Resources/ru
|
English • العربية • български • català • čeština • Deutsch • Ελληνικά • español • فارسی • français • hrvatski • magyar • italiano • română • 日本語 • 한국어 • lietuvių • Nederlands • norsk • polski • português • русский • Türkçe • українська • 中文(中国大陆) • 中文(台灣) • עברית • azərbaycanca • |
О проекте | Разработка | Сообщество | RepRap машины | Ресурсы | Политика
Эта страница находится в стадии разработки и может содержать устаревшую информацию
Contents
Программный инструментарий
Программный инструментарий можно условно разбить на 3 части:
- CAD инструменты.
- CAM инструменты.
- Прошивка для электроники.
Инструменты CAD(САПР)
Инструменты автоматизированного проектирования, или САПР, используются для проектирования трехмерных деталей для печати.
Программное обеспечение
САПР предназначены для того, чтобы вы могли легко редактировать детали на основе параметров. Иногда файлы САПР упоминаются как «параметрические» файлы. Они обычно представляют детали или сборки в терминах конструктивной сплошной геометрии или CSG. С помощью CSG детали могут быть представлены в виде дерева логических операций, выполняемых с примитивными формами, такими как кубы, сферы, цилиндры, пирамиды и т. Д.
Бесплатное / Свободное программное обеспечение с открытым исходным кодом ( FLOSS ) приложения, которые попадают в эту категорию, будут OpenSCAD, FreeCAD и HeeksCAD и другие. Примерами проприетарного ПО и полностью параметрических инструментов CAD являются PTC Creo (ранее PTC Pro / Engineer), Dassault Solidworks, Autodesk Inventor и другие.
Обычно в таких программах геометрия сохраняется в дереве элементов, где размеры могут быть изменены численно, а затем геометрия пересчитывается с большой точностью. Геометрия является математическим представлением, где, например, окружность генерируется из ее центра, радиуса и параметров плоскости (поэтому, «параметрически»). Независимо от того, насколько вы увеличиваете масштаб, круг все равно остается кругом, и программа САПР без проблем находит его центр, когда вы нажимаете на него. Это может быть весьма полезным при создании чертежей с расстояниями между кругом и сечениями, которые необходимо концентрически удалять.
Другой более слабой категорией CAD-инструментов могут быть приложения, которые представляют детали в виде 3D Wikipedia:ru:Полигональная сетка. Эти приложения предназначены в большей степени для использования специальных эффектов и художественных аппликаций. Они также кажутся немного более удобными для пользователя. FLOSS - приложениями этой категории будут Blender и Art of Illusion. Инструментами Wikipedia:ru: Проприетарное ПО являются Autodesk 3ds Max, Alias Autodesk, Google Sketchup и другие.
Кроме того, вы можете создавать формы только с помощью веб-браузера на некоторых веб-сайтах, таких как TinkerCAD.com (легко) или 3DTin.com (более изощренно), которые позволяют вам загрузить полученную геометрию.
Некоторые из упомянутых выше инструментов также используют параметрические данные для генерации геометрии, но многие просто регистрируют положения вершин многоугольников, составляющих модели. Некоторые используют параметры для генерации геометрии, но затем удаляют эти данные после размещения вершин. Таким образом, кривая на самом деле является приближением, образованным из ряда прямых линий между точками. Поэтому такие инструменты лучше подходят для проектирования, где точность размеров менее важна, чем внешний вид и простота использования.
Если вы хотите напечатать как можно меньше материала; При проектировании деталей, оптимизированных по объему в зависимости от деформаций, вы можете использовать оптимизацию топологии с помощью некоммерческого программного обеспечения, такого как Topostruct (см. веб-сайт sawapan.eu), BESO или свободного использования с открытым исходным кодом, такого как Topy, ПО для оптимизации топологии, написанное на Python блестящим автором William Hunter. (ToPy в Google Code; несколько связанных инструментов в topology-оптимизация в github).
Может быть полезно иметь программное обеспечение для проектирования решеток, которое создаст поддержку вашей детали или заполнит ее так, чтобы сохранить материал. Одной из наиболее используемых является Materialise Magics, но есть и Netfabb. Оба являются проприетарными, а не бесплатными.
Файлы
В большинстве случаев 3D-приложения сохраняют свои файлы в формате для конкретного приложения, который в случае проприетарных САПР-инструментов обычно часто изменяется и строго охраняется коммерческой тайной.
Взаимозаменяемых САПР форматов файлов очень мало. Двумя наиболее широко используемыми сменными форматами файлов CSG являются STEP и IGES. Оба снимают геометрию с параметрических данных и предлагают только «мертвые» твердые тела. Элементы могут быть добавлены и удалены, но базовая форма заблокирована. «На сегодняшний день не существует общеотраслевого взаимозаменяемого формата файлов, в котором сохраняются параметрические данные».
Наиболее широко используемый формат файла сменной сетки - STL. Файлы STL важны, потому что, как мы увидим ниже, они используются инструментами CAM.
Файлы сетки не могут быть преобразованы в форматы файлов CSG, поскольку они не содержат параметрических данных - только координаты вершин многоугольника, составляющих сплошной объем. Однако форматы файлов CSG могут быть преобразованы в форматы файлов сетки.
Таким образом, если вы разрабатываете деталь, рекомендуется разработать ее с помощью приложения CSG CAD, а также сохранить и распространить исходный параметрический файл вместе с созданными файлами STL.
Parametric file format
STEP export format

STL mesh format



Инструменты CAM
Инструменты автоматизированного производства, или CAM, обрабатывают промежуточный этап перевода файлов САПР в удобный для машин формат формат, используемый электроникой RepRap. Более подробная информация находится на странице CAM Toolchains.
Программное обеспечение
"Нарезочное" программного обеспечения
Чтобы превратить трехмерную деталь в понятный для машины формат, программному обеспечению CAM требуется файл STL. Машинно-ориентированный формат, используемый для печати, называется G-code/ru. Ранние версии RepRaps использовали протокол, называемый SNAP, но теперь используются G-коды промышленного стандарта. Для преобразования файлов STL в G-код вы можете использовать одну из следующих программ:
- MatterSlice/ru (Быстрый и полнофункциональный - работает с MatterControl/ru) (с открытым исходным кодом)
- Skeinforge/ru (устаревшее решение) (по-прежнему один из лучших и настоятельно рекомендуется для точных отпечатков)
- Cura/ru (также включает отправителя G-кода) (Чрезвычайно быстрый и точный)
- Slic3r (популярное решение для большинства RepRappers) (множество ошибок в каждом выпуске)
- Kisslicer (Быстрый и точный с очень небольшим количеством ошибок) (Закрытый источник)
- RepSnapper/ru
- ПО хоста для работы RepRap
- X2sw/ru
- SuperSkein/ru
- SlicerCloud (онлайн решение Slic3r)
- Simplify3D/ru (платный набор «все в одном»)
Преобразование STL в G-код нарезает часть, похожую на салями, затем просматривает поперечное сечение каждого среза и вычисляет путь, по которому печатающая головка должна пройти, чтобы выдавить пластик, и вычисляет количество нити, которое необходимо пропустить через Экструдер на пройденную дистанцию.
(Обычно вам не нужно восстанавливать, редактировать или как-то еще манипулировать файлами STL напрямую, но если вы это сделаете, вы можете найти программное обеспечение в Useful Software Packages#Software for dealing with STL files полезным).
Интерпретатор G-кода
После того, как у вас есть файл G-кода, вы должны запустить его через интерпретатор G-кода. Этот инструмент читает каждую строку файла и отправляет электронные сигналы двигателям, чтобы сообщить RepRap, как двигаться. Существует два основных варианта интерпретатора G-кода:
- Программа рабочей станции под названием EMC (или другое программное обеспечение CAM), которая управляет оборудованием напрямую или
- Прошивка для электронной платформы RepRap со встроенным аппаратным интерфейсом, который имеет интерпретатор G-кода
Отправитель G-кода
Чтобы отправить файлы G-кода встроенному аппаратному интерпретатору, вам необходимо:
- Загрузите файл G-кода на карту памяти (обычно на SD-карту), если она поддерживается.
- Передавайте G-коды (обычно по одной строке) через последовательный порт (уровень RS-232 или TTL, часто используемый с преобразователем USB) или через прямое соединение USB с помощью одной из следующих программ на рабочей станции:
- * MatterControl
- * Cura
- * ReplicatorG
- * RepSnapper
- * RepRaptor
- * ПО хоста для работы RepRap
- * send.py
- * reprap-utils (больше не поддерживается)
- * Pronterface
- * RebRep
- * Repetier-Host (закрытый источник)
- * X2sw
- * Simplify3D (закрытый источник)
- * OctoPrint
Некоторые из них являются кроссплатформенными, в то время как другие будут работать только с определенными операционными системами или предпочитают определенные встроенные интерпретаторы встроенного ПО.
Файлы деталей
Основными файлами, используемыми инструментами CAM, являются STL и G-код. Инструменты CAM преобразуют файлы STL в файлы G-кода. Официальные файлы STL для Mendel/ru хранятся в хранилище reprap subversion. Чтобы получить копию этих файлов, выполните следующие команды в Ubuntu:
sudo apt-get install subversion svn co https://svn.code.sf.net/p/reprap/code/trunk/mendel/mechanics/solid-models/cartesian-robot-m4/printed-parts/
Это создаст каталог, полный STL-файлов, которые вы можете затем передать соседу, у которого уже есть RepRap, что распечатает детали для вас. Вы также заметите, что этот каталог содержит Файлы AoI. Эти файлы для Art of Illusion. Это приложение САПР, которое использовалось для проектирования деталей, а затем сохраняло их в виде файлов STL.
Прошивка
Электроника Reprap управляется недорогим процессором, таким как Atmel AVR. Процессоры Atmel - это то, что используют микроконтроллеры на базе Arduino. Эти процессоры очень слабы по сравнению с обычным ПК 10-15 летней давности, который вы найдете только на свалке. Тем не менее, они являются процессорами, поэтому на них может работать примитивное программное обеспечение. Это примитивное программное обеспечение называется прошивкой Reprap.
Из всей цепочки программного обеспечения, которая обеспечивает работу Reprap, его прошивка теснее всего приближает вас к реальному программированию. Технически, то, что вы делаете с прошивкой, называется кросс-компиляция.
Этот процесс в общем состоит из следующих этапов:
- Установите Arduino IDE на свой ПК.
- Загрузите исходный код прошивки с веб-сайта.
- Внесите небольшие изменения в исходный код, чтобы указать, какое у вас оборудование.
- Скомпилируйте прошивку, используя Arduino IDE.
- Подключите контроллер к компьютеру через USB-кабель.
- Загрузие прошивку в CPU вашего контроллера.
G-коды
После загрузки микропрограммы микроконтроллера он готов принимать G-код через программный эмулируемый последовательный порт RS-232 (он же COM-порт). ) - обычно работающий через USB. Этот порт отображается, когда вы подключаете Arduino к ПК через USB. Вы можете либо использовать программу для отправки этих G-кодов через последовательный порт, либо вы можете ввести их вручную, если запустите обычное терминальное приложение, такое как hyperterm или minicom. Если вы используете программы, они обычно принимают файлы в формате gcode.
Для всех доступных прошивок смотрите Список прошивок и List of Firmware. Ниже приведен краткий список самых популярных прошивок:
Программное обеспечение
Для компиляции и загрузки прошивки в электронику на основе Arduino вы можете использовать IDE Arduino, которую можно загрузить с веб-сайта Arduino.
Файлы
Файлы встроенного программного обеспечения обычно упаковываются в виде исходного кода для проекта Arduino IDE. Исходный код Arduino состоит из нескольких файлов PDE (или Arduino ver 1.0, INO), а также некоторых дополнительных файлов .cpp и .h . Среда IDE Arduino компилирует исходный код в один файл .hex . Когда вы щелкаете по значку загрузки в Arduino IDE, он загружает файл .hex в электронику.
Подробнее
Вкратце, вот краткое резюме всего выше, кроме программного обеспечения САПР:

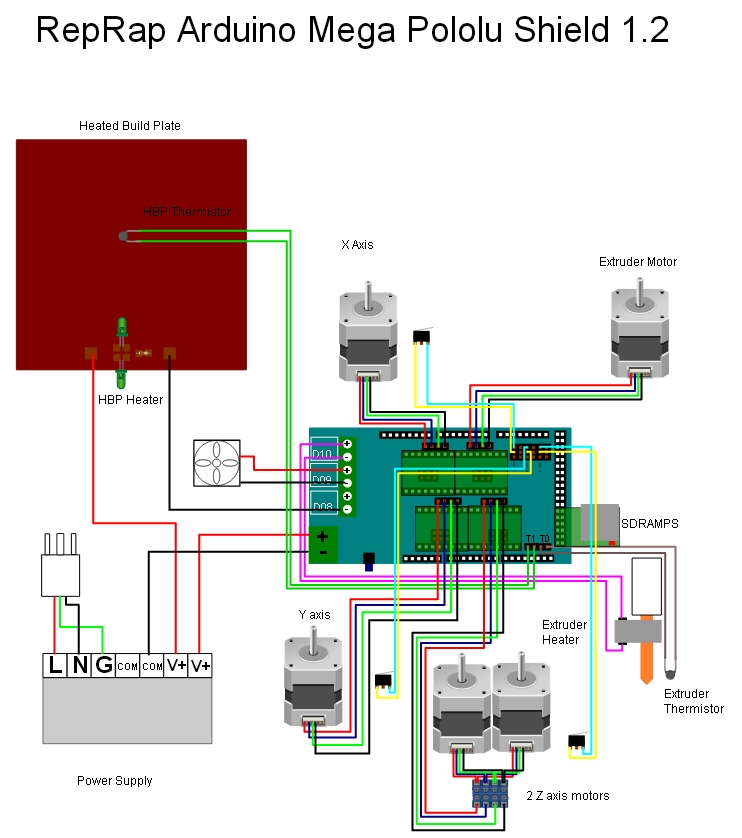
Электроника
Обзор
В целом вся электроника reprap разбита на 5 различных областей:
Контроллер
Контроллер это "мозг" RepRap. Почти все контроллеры RepRap основаны на Arduino микроконтроллере - и, в последнее время, ARM microcontroller. ( Первое поколение RepRap использовало PICmicro) Программное обеспечение, которое выполняет микроконтроллер, называется firmware/ru.
Хотя существует множество вариаций, они являются взаимозаменяемыми и в основном делают одно и то же. Иногда контроллер представляет собой автономную печатную плату с микросхемами, иногда контроллер представляет собой Arduino Mega с дополнительной платой (называемой "shield"). Найти больше на List of Firmware.
Шаговые двигатели
Шаговый двигатель - это тип электродвигателя, которым можно точно управлять с помощью контроллера. Большинство моделей RepRap используют от 4 до 5 шаговых двигателей. От 3 до 4 двигателей управляют движением оси x / y / z (иногда ось z управляется 2 двигателями), и 1 двигатель используется на экструдере.
Шаговые драйверы
Шаговый драйвер - это микросхема, которая действует как посредник между шаговым двигателем и контроллером. Это упрощает сигналы, которые необходимо отправить на шаговый двигатель, чтобы заставить его двигаться.
Иногда шаговые драйверы находятся на отдельных платах, которые связаны с контроллером с помощью кабелей.
Иногда шаговые драйверы находятся на небольших платах, которые подключаются непосредственно к самому контроллеру. В этом случае в контроллере будет достаточно места как минимум для 4 из этих небольших печатных плат (по одной для каждого шагового двигателя).
Наконец, иногда шаговые драйверы впаиваются прямо в сам контроллер.
Граничные остановщики
Граничный остановщик - это очень маленькая и простая печатная плата с каким-либо переключателем на ней.
Граничная остановка имеет две цели:
- Калибровать пределы печати при запуске (декартовы XYZ: ось начинается (/ заканчивается)) (Delta printers: см. Delta robot).
- Отметить когда головка инструмента (например, extruder/ru) переместилась слишком далеко в одном направлении и вызовет ошибку. Причина может быть в том, что механика теряет шаги - если шаговые моторы не управляются должным образом электроникой или встроенным программным обеспечением. (Неправильно созданный G-код из 3D-модели, который пытается отправить инструментальную головку из области печати, должен привести к ошибке, сгенерированной микропрограммой.)
Таким образом, обычно их 6: по 2 для каждой оси (большинство встроенных программ включают программные настройки для максимальной позиции, что позволяет требовать только минимальную позицию граничных поверхностей). Один концевой упор подключается через провода к:
- Контроллеру.
- Плате шагового драйвера.
Подогреваемый стол
Стол печати - это то, на что RepRap выдавливает пластик, где создаются пластиковые детали.
Хотя heated bed/ru считается необязательным компонентом машины, он часто становится необходимой и неотъемлемой частью работы RepRap в течение длительного времени, поскольку без подогреваемого слоя детали имеют тенденцию к слишком быстрому охлаждению. Это приводит к искривлению углов (так как пластик сжимается при охлаждении) или к тому, что деталь слишком рано отрывается от печатного стола, что портит отпечаток.
Подогреваемые столы работают по тому же принципу, что и кухонный тостер. Это просто гигантские резисторы с датчиком температуры. Смотрите также:
{kind=link}
Подробнее
Чтобы увидеть более подробную информацию об электронике, взгляните на страницу List of electronics.
Механическая часть
Механику RepRap обычно можно разбить на две части:
- Движение по осям x / y / z.
- Печатный стол
Движение по осям X / Y / Z
Страница главной категории для Mechanical arrangement
Если на RepRap смотреть спереди, движение оси X происходит из стороны в сторону, то есть движение слева направо, движение оси Y - движение вперед / назад, а движение оси Z - вверх и вниз в вертикальной плоскости.
Линейное движение обычно выполняется с помощью одного из 2 различных методов:
- Ременной/шкивовый привод.
- Резьбовой стержень или ходовой винт.
Ремни и шкивы хороши для быстрого / легкого движения, а резьбовые стержни хороши для медленного, но сильного движения. Большинство повторов использует комбинацию ремней для перемещения по оси X / Y и резьбового стержня для перемещения по оси Z.
Ремни и шкивы
Когда дело доходит до точности, самая важная часть вашей машины - это ваша комбинация ремней/шкивов. Современное состояние техники - это ремень GT2 вместе с машинно-обработанным шкивом, который соответствует точному размеру отверстия ваших шаговых двигателей (обычно это 5 мм).
Существует много типов комбинаций ремней/ шкивов, в настоящее время (март 2012 г.) наиболее часто используются:
- T5
- это «асинхронные» метрические зубчатые ремни. У них трапециевидные зубцы и преднамеренный люфт для уменьшения износа ремня и шума при однонаправленном применении. Их трудно достать в Северной Америке. Сами шкивы могут быть напечатаны. Использование шкива с печатью даст вам примерно такие же результаты, как если бы вы использовали комбинацию шкив / ремень MXL с неправильным размером отверстия.
- T2.5
- Как и T5, это асинхронные метрические комбинации ремень / шкив. Они имеют шаг 2,5 мм (0,098 дюйма) и пригодны для печати. При использовании шкивов одинакового диаметра обеспечивается лучшее сцепление (по сравнению с t5) на ремне, что дает лучший результат. Наилучшие результаты достигаются с металлическими шкивами благодаря тонкому профилю зуба.
- MXL
- Эти пояса существуют с 1940-х годов. Как и T5 & T2.5, это также асинхронные зубчатые ремни, но они распространены в Северной Америке, потому что они используют имперские размеры. Расстояние между зубцами составляет 0,08 ", а зубцы трапециевидные. Возможно, вы * сможете * найти шкивы с отверстием 5 мм, но, кажется, это будет сложно. Большинство шаговых двигателей имеют шпиндели диаметром 5 мм.
- HTD
- это означает «привод с высоким крутящим моментом», он был введен Gates в 1971 году. Эти ремни имеют меньший люфт, чем ремни MXL и T5, потому что зубья глубже и закруглены. Эти ремни были первоначально запатентованы компанией Gates, но срок действия патента истек.
- GT2
- Это промышленные синхронные ремни Гейтс PowerGrip® GT®2. GT2 появился потому, что закончились патенты HTD, и им нужен был новый профиль зубов, который не был достоянием общественности. Гейтс говорит, что ремни GT2 будут нормально работать на шкивах HTD, но не наоборот. Ремни GT2 более прочные, чем ремни HTD, но им необходим профиль зубьев GT2 на шкивах, чтобы достичь их окончательного преимущества в прочности перед HTD. Их может быть сложнее найти везде.
- Spectra
- леска Spectra с оплеткой из волокна быстро становится популярным материалом для замены ремней во многих разработках, после ее первого внедрения в Tantillus, а затем во многих принтерах Delta. Это дешево и доступно в большинстве городов мира. После правильной затяжки он почти не имеет люфта и обеспечивает очень плавное движение из-за отсутствия неровных зубьев и невероятно малого радиуса изгиба, что позволяет выполнять высокие шаги на мм.
Для получения дополнительной информации см. Choosing Belts and Pulleys.
Резьбовой стержень
Большинство машин использует резьбовой стержень для оси Z. Ось Z не должна двигаться быстро (но лучше, если она может двигаться быстро), потому что она обычно увеличивается только на десятые доли мм за раз. Резьбовой стержень подходит для точности и силы. Для RepRap не требуется сила, но некоторые CNC станки используют резьбовой стержень для всех 3 осей. Поскольку резьбовые стержни по оси Z выдерживают вес каретки X, рекомендуется использовать высокопрочную нержавеющую сталь для стержня и гайки, в противном случае их резьба будет сильно изнашиваться, что приведет к преждевременному выходу из строя.
Примечания по обратной реакции
Одна вещь, на которую следует обратить внимание во всех способах перемещения, - это «обратная реакция». Люфт - это то колебание, которое вы ощущаете как в стержне с резьбой, так и в ремнях / шкивах, когда вы «меняете направление». Это колебание / погрешность влияет на точность.
Приведенные выше ремни T5 и MXL изначально были предназначены для использования в качестве ремней ГРМ. Ремни ГРМ обычно вращаются только в одном направлении, так что люфт для них не критичен. Поэтому ремни GT2, разработанные для изменения направления, будут более точными.
Стандартный способ компенсации зазора резьбового стержня состоит в том, чтобы использовать 2 гайки и раздвинуть их с помощью пружины. Этот вид гарантирует, что гайки всегда давят на резьбу, чтобы при изменении направления они не колебались. Не уверен, имеет ли это смысл, но я все равно оставлю это здесь.
Печатный стол
Печатный стол - это то, на чем печатаются детали. Печатный стол может быть неподвижной, как в случае с оригинальным reprap Darwin, или она может двигаться вдоль одной из осей x / y / z. У большинства репрапов стол перемещается вдоль оси Y, но некоторые также перемещаются вдоль оси Z.
Стол обычно состоит из двух плит: верхней и нижней.
Верхняя пластина
Верхняя пластина крепится к нижней пластине на пружинах. Пружины позволяют выравнивать стол с помощью регулировочных винтов. Это также было разработано на тот случай, если вы случайно вдавите печатающую головку в него.
Верхняя плита может нагреваться или не нагреваться. Обычно она изготавливается из печатной платы или из металла. Если пластина нагревается, на нее обычно кладется кусок стекла, удерживаемый зажимами типа "бульдог".
Обычно на верхнюю пластину наносится пленка/лента, чтобы выступать в роли поверхности для печати. Это помогает экструдированному пластику прилипать к печатному столу, а также облегчает удаление детали, как только она будет готова. Два самых распространенных типа ленты - это синяя лента для рисования и каптонная лента.
Нижняя пластина
Иногда нижняя пластина иногда называется лягушачьей плитой, потому что оригинальная нижняя пластина Менделя выглядела как лягушка.
Она обеспечивает прочную основу, к которой может быть подключена верхняя пластина. Если стол движется вдоль одной из осей, то нижняя пластина напрямую соединяется с механизмом перемещения стола. Для оси Y это обычно означает ремни или для оси Z это обычно означает резьбовой стержень.
Экструдер
Экструдер отвечает за подачу filament через сопло и расплавление его при его осаждении на слой, где изготавливается деталь.
Экструдер состоит из двух частей:
- Холодный конец
- Горячий конец
Обычно «холодный конец» соединяется с «горячим концом» через термический разрыв или изолятор. Это должно быть достаточно жестким и точным, чтобы надежно передавать нить с одной стороны на другую, но при этом предотвращать большую часть теплопередачи. Материалами выбора обычно являются PEEK-пластик с вкладышами из ПТФЭ или ПТФЭ с механическими опорами из нержавеющей стали или их комбинация.
Однако существуют также Bowden Extruders, которые отделяют горячий конец от холодного конца длинной трубкой. Экструдеры Боудена намного быстрее, потому что они намного легче.
Холодный конец, колдэнд
Здесь это может немного запутать. Люди склонны называть холодный конец также «экструдером». На самом деле это только половина всего механизма экструдера. Холодный конец - это деталь, которая механически подает материал к горячему концу, который, в свою очередь, плавит его.
Популярные холодные концы:
Горячий конец, хотэнд
- Смотрите также Hot End Design Theory
Горячий конец является, пожалуй, самым сложным аспектом 3d-принтеров, поскольку он связан с непростой задачей плавления и экструзии пластиковой нити. В общем, хотэнд представляет собой металлический корпус, в котором есть:
- Резистор или нагревательный элемент, который нагревается и плавит пластик (обычно около 200С)
- Термистор или Термопара, измеряет температуру
Электроника в основном следит за температурой через термистор, а затем повышает или понижает ее, изменяя количество энергии, подаваемой обычно какой-либо формой PWM
см. сравнение Hotend: Hot End Comparison и Hot End
Нить накала
Как правило, люди используют один из двух типов нити: ABS или PLA. ABS сильно пахнет при расплавлении и деформации, но является относительно сильным, тогда как говорят, что PLA пахнет вафлями и является биоразлагаемым. Пары АБС вредны для здоровья. ABS гнется, прежде чем сломаться, тогда как PLA относительно хрупкая. Следовательно, для деликатных структурных ролей следует использовать PLA, однако для других целей ABS может быть идеальным.
Примечания по PID
Иногда вы будете слышать, как люди говорят о PID при обсуждении экструдеров. PID - это алгоритм управления с обратной связью, который инженеры используют годами. Это математический алгоритм, который использует обратную связь от датчиков (например, для измерения температуры) и управляет выходным сигналом (например, включением и выключением нагревателя) для достижения и поддержания желаемого заданного значения (например, температуры, которую вы хотите иметь в экструдере).
Пример из реальной жизни: когда вы едете на машине по шоссе, вы выполняете свою функцию, подобную PID, наблюдая за дорогой и регулируя рулевое колесо, чтобы оставаться на полосе движения. Если вы приспосабливаетесь слегка за раз и достаточно часто, вы остаетесь в своей полосе. Но если вы подождете, пока не достигнете границы дорожного покрытия, прежде чем исправлять курс, люди подумают, что вы пьяны, ведь вы будете колебаться по всей дороге. Вы можете добраться туда, куда идете, но это будет некрасиво. В PID используются константы (числа), которые должны быть настроены для приложения. Продолжая пример за рулем, пьяный имеет неверные константы, трезвый - только правильные.