Wallace/ru
|
English • العربية • български • català • čeština • Deutsch • Ελληνικά • español • فارسی • français • hrvatski • magyar • italiano • română • 日本語 • 한국어 • lietuvių • Nederlands • norsk • polski • português • русский • Türkçe • українська • 中文(中国大陆) • 中文(台灣) • עברית • azərbaycanca • |
Release status: experimental

| Description | Wallace is a parametric version of the Printrbot design.
|
| License | |
| Author | |
| Contributors | |
| Based-on | |
| Categories | |
| CAD Models | |
| External Link |
Описание
RepRap Wallace назван в честь Alfred Russel Wallace, который вторым, независимо от Дарвина, придумал теорию эволюции путем естественного отбора, еще до публикации Дарвина. RepRap Wallace основан на Printrbot, но полностью переработан дизайн в OpenSCAD для большей надежности (без слабых клёпок), но не менее простым. он спроектирован для использования 6 мм направляющих валах и шаговых двигателей типа-размера NEMA14, такие же как использовались в проекте Huxley, и линейных подшипниках LM6UU, так же параметрически можно использовать NEMA17/M8/LM8UU. В зависимости от размеров направляющих валов , Wallace может быть сконфигурирован с объемом печати 200x200x140mm, или больше/меньше взависимости от направляющих . STL файлы можно найти на thingverse, исходный код Github, последние анонсы / обновления можно найти на Whosawhatsis' Google+ page. Этот проект находится в стадии разработки. Обсудить версию 2 можно на https://plus.google.com/u/0/105535247347788377245/posts/SRZpmqRG2on .
- Не путайте с проектом Wally RepRap.
Характеристики
- Печатаемые части: 26
- Не печатные части: ~125+ (4 шаговых двигателя, 7 ходовых винта , 6 направляющих валов, 11 линейных подшипников LM6UUs, 6 323s, 2 ремня, + ~89 разного оборудования, +экструдер, +электроника)
- Стоймость материалов: ~200 ($50 пластик, 60 шаговые двигатели, 30 направляющие, 20 подшипники, 10 ремни, 30 misc.)
- Цена: ???
- Размер печати: 200mm x 200mm x 140mm (8"x8"x5.5")
- Погрешность: X,Y,Z=0.07,0.07, 0.025mm (с микрошагом 4,4,2 )
- Скорость: ??? (Перемещение/печать)
Первоначальным руководством по сборке является Wallace Build Manual. --MrJohn 01:25, 3 Февраля 2012 (UTC)
Видео, показывающее первую печать Printf.bot в 2011.12.31, под управлением R2C2 (записано 2011.12.31 Casainho):
<videoflash>Igdbltngic0</videoflash>
Видео, записанное 2011.12.17 компанией Whosawhatsis:
<videoflash>0QrEmGlZT0w</videoflash>
<videoflash>fq3ihIT_C9s</videoflash>
Детали
В дополнение к печатным деталям необходимы следующие детали (это предварительный список который будет дополняться по мере развития проекта):
- 2 шаговых stepper мотора с высоким крутящим моментом (~20 ozf-in) типа размера NEMA14 stepper. Источник:
- Pololu
- Zapp Automation
- Waterott для 20 Oz на не двойной вал в Европе
- 2 шаговых stepper мотора с низким или с высоким крутящим моментом типа размера NEMA14 на ось Z.
- 1 Комплект электроники electronics
- 1 Экструдерextruder
- 3 пары 6мм направляющих валов (Размеры будут зависеть от желаемого объема печати. Используя 350мм X 320мм X 350мм получим около 200мм x 200мм x 170мм).
- McMaster-Carr
- Fastenal
- ebay
- Их можно найти у местных поставщиков.
- 3.5 пары ходовых винтов M6(Размеры будут зависеть от желаемого объема печати , 1 пара между базами, 1 пара ходовой винт оси Z, 1 пара на ножки, и еще один между z-образными зажимами).
- McMaster-Carr
- Fastenal
- ebay
- Их можно найти у местных поставщиков.
- 18 гаек M6 -- (8 для ходового винта оси X, 2 ходового винта для оси Z , 4 для верхнего зажима Z, 4 для натяжного ролика оси Y)
- Их можно найти у местных поставщиков.
- 2 гайки со стопором M6 -- (для муфт ходового винта. Вы можете заменить их 2 обычными гайками затянутыми вместе.)
- Их можно найти у местных поставщиков..
- 12 шайб M6 . (8 для ходового винта оси X, 4 для ходового винта оси Z)
- Их можно найти у местных поставщиков.
- 11 линейных подшипников типа-размера LM6UU. (4 на направляющие валы/ основание оси Y, 4 на направляющие валы оси Z/окончание оси X, 3 на направляющие валы оси X/каретка оси X)
- 3 подшипники типа- размера 623. (6 необходимы для спаренных подшипников)
- 17 10мм винт M3 -- (8 на моторы базы + зажимы подшипников оси Y, 4 на муфту оси Z, 2 на приводные шкивы, 2 на соединения оси Z, 1 для зажима ремня оси X)
- Их можно найти у местных поставщиков.
- 7 30мм винт M3 -- (2 на натяжной ролик оси Y, 2 на крепление ремня оси Y, 3 на крепление моторов оси X? (крепление моторов оси X может опускаться примерно на 15 мм))
- Их можно найти у местных поставщиков.
- 2 50мм шпильки M3 -- ( натяжной ролик оси X + штанга оси X/крепление подшипников оси Z)
- Их можно найти у местных поставщиков.
- Примерно 13 гаек и шайб.
- Их можно найти у местных поставщиков.
- 1 Лист МДФ или другой плоский материал(Размеры будут зависеть от желаемого объема печати).
- Их можно найти у местных поставщиков и отрезать нужный размер.
- 2 belts ремня
Печатные части
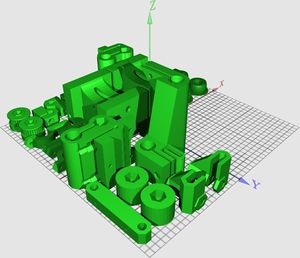 -- STL файл для всех печатных частей занимающих 3/4 печатного объема одной платформы размером 200ммx200ммx70мм. STL файлы так же доступны для 3 платформ 100ммх100 мм на thingiverse page -- STL файл для всех печатных частей занимающих 3/4 печатного объема одной платформы размером 200ммx200ммx70мм. STL файлы так же доступны для 3 платформ 100ммх100 мм на thingiverse page
|

- 2 основы
- Доступны на thingiverse page
- 4 крепления печатной платформы
- Доступны на thingiverse page
- 2 муфты ходового винта
- Доступны на thingiverse page
- 1 каретка оси X
- Доступны на thingiverse page
- 1 ограничитель слева оси X
- Доступны на thingiverse page
- 1 ограничитель справа оси X
- Доступны на thingiverse page
- 4 Фиксаторы подшипников оси Y
- Доступны на thingiverse page
- 1 натяжной шкив оси Y
- Доступны на thingiverse page
- 3 натяжные шкивы (установите 4-й шкив, чтобы правильно выровнять ремень X, если диаметр вашего приводного шкива не соответствует)
- Доступны наthingiverse page
- 2 приводных шкива
- Шкивы типа MXL/GT2 с 29 зубами
 на thingiverse page. это шкивы с высокоточными зубьями, и могут нуждаться в особом уходе при производстве. Согласно этому комментарию на thingiverse page, WhosawhatsisPer хорошие результаты получились используя ABS пластик с высотой слоя 0,29 мм с 1.5 Вт/т с шагом резьбы 0,435 мм. ??? Как альтернативу,если вы не уверены в качестве печати, можно использовать XL/T5 pulleys like thing:11256 с appropriate belts. ( используйте 12 зубов в XL или GT2 что примерно соответствует диаметру ролика.)
на thingiverse page. это шкивы с высокоточными зубьями, и могут нуждаться в особом уходе при производстве. Согласно этому комментарию на thingiverse page, WhosawhatsisPer хорошие результаты получились используя ABS пластик с высотой слоя 0,29 мм с 1.5 Вт/т с шагом резьбы 0,435 мм. ??? Как альтернативу,если вы не уверены в качестве печати, можно использовать XL/T5 pulleys like thing:11256 с appropriate belts. ( используйте 12 зубов в XL или GT2 что примерно соответствует диаметру ролика.)
- Шкивы типа MXL/GT2 с 29 зубами
Опционально:
- 4 ножки
- Доступны на thingiverse page