Clone Wars FAQ/es
|
English • العربية • български • català • čeština • Deutsch • Ελληνικά • español • فارسی • français • hrvatski • magyar • italiano • română • 日本語 • 한국어 • lietuvių • Nederlands • norsk • polski • português • русский • Türkçe • українська • 中文(中国大陆) • 中文(台灣) • עברית • azərbaycanca • |
Contents
- 1 General
- 2 Esctructura/mecánica
- 2.1 ¿Qué es un cable bowden?
- 2.2 ¿Qué necesito para montarle bowden a mi impresora?
- 2.3 Los piñones patinan sobre los ejes de los motores ¿Cómo lo soluciono?
- 2.4 Los rodamientos no entran en las varillas
- 2.5 Después de terminar una impresión, el hot end deja de funcionar
- 2.6 La correa no queda lo suficientemente tensa
- 2.7 Sin piezas extra
- 3 Electrónica
- 3.1 Los motores no se mueven/los calentadores no se encienden
- 3.2 ¿Esta fuente de alimentación me sirve?
- 3.3 ¿Cuántos cables y de qué tipo necesito para montar mi impresora?
- 3.4 Estoy probando la RAMPS y no se mueven los motores
- 3.5 Estoy probando la RAMPS y no se enciende el fusor o la base caliente
- 3.6 El motor a pasos sólo vibra y no se mueve
- 3.7 El motor a pasos avanza a trompicones
- 3.8 El motor a pasos cambia de dirección aleatoriamente
- 3.9 Comprobar MOSFET con multímetro
- 3.10 Tengo unos drivers (Stepsticks / Clones Pololu) con dos potenciómetros
- 3.11 ¿Cómo puedo conectar los motores del eje Z en serie? y ¿por qué hacerlo así?
- 3.12 Se me apaga la cama caliente
- 3.13 Uso del autotune para estabilizar las temperaturas del extrusor y la cama
- 3.14 La pantalla LCD se enciende pero solo funciona (muestra caracteres) si conecto la electronica por USB al PC (Con RAMPS)
- 4 Firmware
- 4.1 Sprinter
- 4.2 Marlin
- 4.2.1 El homming del eje Z varía de altura cada vez que se ejecuta
- 4.2.2 Los motores giran un poco y se bloquean
- 4.2.3 Errores a la hora de compilar
- 4.2.4 La opción "COOLDOWN" de la pantalla LCD sólo desconecta el hotend y no la heatbed
- 4.2.5 El relé de la cama caliente conecta y desconecta repetidamente
- 4.2.6 Ajustar precisión del encoder al cambiar variables del firmware
- 4.2.7 Ajustar el número de clicks del encoder necesarios para moverse a la siguiente opción de menú
- 4.2.8 ¿Cómo editar la página de inicio de una GLCD?
- 4.2.9 ¿Cómo utilizar cables planos largos en el LCD y que la tarjeta SD siga funcionando?
- 5 Software / host
- 5.1 Al intentar hacer movimientos con el GCODE G1, los desplazamientos no corresponden
- 5.2 El software que utilizo como host se desconecta de forma inesperada durante una impresión
- 5.3 Cura - Plugins
- 5.4 Tengo Ubuntu de 64 bits y no encuentro los .deb para el Arduino 0022
- 5.5 ¿Cómo puedo crear accesos directos en Ubuntu / Debian?
- 6 Diseño/CAD
- 7 Impresión
- 8 Otras guías
General
¿Por qué debería utilizar el FAQ?
El FAQ es una herramienta pensada para dejar constancia de las dudas que surgen y de la respuesta dada. Acude aquí siempre que tengas una duda, es posible que alguien la haya tenido antes y haya sido documentada. Siempre que no encuentres la respuesta a tu pregunta, anota tu pregunta aquí y después pregunta en la lista, de forma que el que te conteste, también lo haga dejando constancia en la wiki, para que otros en el futuro puedan encontrar de nuevo esa respuesta.
Soy nuevo, quiero construir mi impresora ¿Por dónde empiezo?
Lee la introducción y a partir de ahí, conocerás los primeros pasos que debes dar para construir tu impresora.
¿Cómo pongo mi impresora el el árbol genealógico?
Edita la página del Imperio de los Clones y añade tu impresora en la lista de "Jedis". Obijuan cada cierto tiempo saca una nueva versión del Árbol Genealógico, ten paciencia.
¿Cómo me apunto al banco de piezas?/¿Cómo consigo las piezas imprimibles?
Lee la información de la página del banco de piezas. Ahí se explica cómo apuntarte para recibir una donación (tienes que editar la wiki). Otra opción es que compres las piezas, algunas ofertas se publican en el bazar Jedi o en la lista de correo. También puedes encontrar ofertas en eBay.
Esctructura/mecánica
¿Qué es un cable bowden?
Es un mecanismo de transmisión del movimiento en el que el movimiento de un núcleo (en este caso filamento) se transmite a través de un tubo exterior al mismo.
La ventaja que tiene para las impresoras 3D es que gracias a él se puede colocar el extrusor fuera del carro del eje X, reduciendo la masa e inercia de éste, y con ella, las vibraciones, permitiendo obtener velocidades de impresión más altas.
¿Qué necesito para montarle bowden a mi impresora?
- La longitud apropiada a tu impresora de este tubo
- Dos racores o dos tuercas del diámetro adecuado (M6)
- Piezas impresas para sujetar el tubo al extrusor y al hotend
Los piñones patinan sobre los ejes de los motores ¿Cómo lo soluciono?
Los motores paso a paso suelen venir con un eje redondeado. Para que las poleas queden bien ajustadas y no resbalen sobre el eje, conviene aplanar una de las caras con una lima para metales, y luego colocar el piñon haciendo coincidir el tornillo prisionero con esa cara.
- vídeo explicativo (inglés).
- Pieza para hacerlo fácilmente: Soporte para motor
Los rodamientos no entran en las varillas
La causa más probable es que no hayas limado los extremos serrados de las varillas. Limalos para achaflanarlos ligeramente para que los rodamientos entren con suavidad. No fuerces, ya que puedes romper los rodamientos. Si después de limar siguen sin entrar, mide ambos con el calibre, lo más probable es que haya algún diámetro equivocado.
Después de terminar una impresión, el hot end deja de funcionar
Si usas un hot end con tefló, puede ser que éste no ajuste bien, cuando paras el plástico fundido se mete por la ranura entre el teflón y el guiado y se solidifica, haciendo lo que llamamos "chincheta". Solución: poner un tubo de teflón mas largo. Para confirmar que es esto, abre el hot end, quita el teflón, y verás que toda la junta entre el teflón y el aluminio está llena de plástico.
La correa no queda lo suficientemente tensa
Si la correa del eje X o Y no queda lo suficiente tensa se pueden perder pasos o provocar backlash, lo que provocará que las impresiones no tengan toda la calidad que pueden tener. Tensar las correas no es fácil, ya que no son elásticas y por lo tanto al hacer excesiva fuerza podemos partir piezas. Estas son algunas técnicas que se pueden emplear para conseguir una tensión adecuada sin necesidad de realizar excesiva fuerza:
Sin piezas extra
- Colocar el eje completamente, la polea del motor puesta y la polea loca puesta.
- Colocar la correa como va a ir finalmente, dejándola recta, pero sin necesidad de hacer demasiada fuerza. Las piezas, tanto del eje X como del eje Y, tienen unos dientitos que sujetan la correa en su lugar, pero que si se hace suficiente fuerza, la correa puede deslizarse por ellos y soltarse.
- Ahora, colocar la correa simplemente en esos dientes, con suficiente tensión para mantener la correa en su lugar y recta, pero sin necesidad de hacer fuerza. En esta posición nos quedamos con los dientes que están atrapados en la pieza.
- Podemos amarrar EL EXTREMO DE LA CORREA QUE VA AL MOTOR a si misma con una brida para evitar que se deslice.
- SOLTAMOS la polea loca quitando el tornillo que la sujeta, y soltamos la correa del extremo que está libre y la metemos UN PAR DE DIENTES más, lo suficiente como para que el eje de la polea se vaya hacia adelante un par de milímetros.
- Sin la polea loca en posición, terminamos de amarrar la correa con las bridas para que no resbale. Los dos extremos quedarían entonces amarrados firmemente con bridas.
- Ahora, la correa está puesta, falta poner por último la polea loca. Con la correa a su alrededor presionamos la polea, hasta que consigamos poder meter el tornillo que la sujeta. (Aquí hace falta algo de fuerza, pero la ventaja es que puede hacerse solo). Con cuidado de no partir la polea, que si está bien hecha, no debería. Presionar la polea a su posición, sin presionar en los lados que son los más débiles. No es necesaria ninguna herramienta, basta con presionar con la punta de los dedos.
- Una vez puesta la polea, atornillamos, y la correa debe quedar tensa, es decir, que haga una nota al golpearla, como una cuerda de guitarra. Si no queda lo suficientemente tensa, soltamos la polea, metemos la correa un diente o dos más, y volvemos a poner la polea. Si nos pasamos metiendo dientes, no conseguiremos llevar la polea a su lugar, pues soltamos un diente o dos hasta que podamos.
Con piezas extra

Tensar utilizando un muelle de una pinza de la ropa
Tensar utilizando un mecanismo de poleas de tensión (La pieza se puede descargar aquí: Prusa i3 X Belt Tensioner)


Electrónica
Los motores no se mueven/los calentadores no se encienden
- ¿Puedes conectarte al arduino por USB?
- Comprueba que la fuente da tensión, no sea que haya «cascado»
- Conecta la RAMPS y comprueba si el arduino sigue respondiendo
- Comprueba que el fusible autorearmable de la RAMPS está bien y no se ha quemado (tiene una vida útil limitada, aun que en principio larga)
- Conecta la cama caliente o el fusor y su termistor, comprueba que el arduino te da valores de temperatura razonables y enciende lo que hayas conectado y comprueba que se calienta
- ...
¿Esta fuente de alimentación me sirve?
¿Da corriente contínua de 12V?¿Da al menos 18A por su salida de 12V? Entonces te sirve, si no no te sirve. Consulta esta sección de la wiki
¿Cuántos cables y de qué tipo necesito para montar mi impresora?
La mayoría pueden ser de 0.25 mm2 de sección (termistores, finales de carrera, incluso motores) y sólo necesitarás algo más para la cama caliente, que lleva unos 10A, y para el «hotend» (para este último incluso no tanto, ya que lleva entorno a los 2A). Los metros que te hagan falta dependerán del modelo de impresora que te hagas, pero calcula 1 metro para cada cosa y tendrás de sobra; y cuatro colores como mínimo:
- 2 termistores x 2 cables cada uno
- 3 finales de carrera x 2 cables cada uno
- 4 motores x 4 cables cada uno (la mayoría de motores ya traerán unos 25~30cm)
- 1 cama caliente x 2 cables
- 1 «hotend» x 2 cables
- 1 «ventilador electrónica» x 2 cables
Normalmente la masa (o tierra) es negra; el resto como quieras; puedes usar el rojo en todo lo que lleve 5V y el amarillo en lo que lleve 12V. Para los motores puedes usar los mismos colores que ya traen.
Para todo lo que use dos cables puede resultarte más cómodo utilizar directamente cable bipolar basándote en los colores citados arriba.
Estoy probando la RAMPS y no se mueven los motores
Conecta los finales de carrera, comprueba que los cables del final de carrera están en el orden adecuado, comprueba que el motor está bien conectado, comprueba la intensidad que el pololu o el stepstick está dando al motor, comprueba que la fuente de alimentación está conectada y encendida.
Estoy probando la RAMPS y no se enciende el fusor o la base caliente
- Conecta los termistores: Es importante verificar que el cableado del termistor sea funcional, en algunos casos si algo no esta haciendo contacto correctamente, o algún cable esta trozado en el interior no hará contacto correctamente y la RAMPS al no detectar el termistor no pasara corriente a los terminales de la resistencia o base caliente.
- Comprueba que la resistencia o la cama caliente está correctamente cableada. Tanto esta prueba como la anterior, puedes ayudarte con el polimetro verificando que haya conductividad en todos tus puntos de cableado donde deba haberla.
- Comprueba que la fuente de alimentación está conectada y encendida.
Si todo lo demás esta bien, es posible que tengas un MOSFET quemado, compruébalo con el polímetro y si está quemado, reemplazalo. Nunca dejes conectado el fusor sin el termistor en su zócalo, podrías dañar el fusor irreversiblemente.
El motor a pasos sólo vibra y no se mueve
Intenta subir la corriente al Pololu correspondiente. El potenciómetro es muy sensible, así que gíralo poco a poco hacia la derecha hasta que se mueva y deje de vibrar, y luego dale 1/8 de vuelta más. Esto lo puedes hacer con todo encendido y el motor moviéndose, pero cuidado dónde metes el destornillador, ¡no vayas a hacer un corto! Si el motor sigue sin moverse es posible que algo esté haciendo que roce demasiado o que lo esté bloqueando. Localiza el problema mecánico, soluciónalo, y luego ajusta el pololu de nuevo.
El motor a pasos avanza a trompicones
Si el motor comienza moviéndose bien pero de repente tiene paradas momentáneas, es posible que tengas demasiada corriente en el Pololu y se esté sobrecalentando. Gira el potenciómetro del Pololu a la izquierda hasta que el motor se pare (sólo vibre) y luego gíralo poco a poco hacia la derecha hasta que vuelva a moverse bien. Luego dale 1/8 de vuelta más. Si pasa directamente de vibrar a avanzar a trompicones, pon un disipador sobre cada pololu/stepstick para bajarles la temperatura. El problema también puede venir por una mala conexión de los pines a la placa o por no haber conectado los cables en el orden correcto.
El motor a pasos cambia de dirección aleatoriamente
Verifica las conexiones del motor, que no tengas falsos contactos y que el conector esté bien insertado.
Comprobar MOSFET con multímetro
Pasos previos
Debes identificar cuál de los pines del MOSFET son la fuente (S de source), la compuerta (G de gate) y el drenaje (D de drain). Busca el número de parte del dispositivo en el catálogo de MOSFET para verificar la configuración de sus terminales. También debes identificar si el tipo de dispositivo es de agotamiento o enriquecimiento.
En la Wikipedia podemos leer: "En algunos casos, se utiliza una línea segmentada en tres partes para el canal del MOSFET de enriquecimiento, y una línea sólida para el canal del MOSFET de empobrecimiento. Otra línea es dibujada en forma paralela al canal para destacar la compuerta".
Los integrados STP55NF06L y IRLB8743PBF son del tipo enriquecimiento. En los esquemas del MOSFET, podemos ver que la línea que simboliza el canal está segmentada en tres trozos.
En este sencillo vídeo se explica un método fácil y rápido para comprobar tus MOSFETs
Aquí tienes descrito otro método:
Colócate la pulsera antiestática en la muñeca y conéctala o ajústala en un punto de puesta a tierra firme, como por ejemplo un caño de agua fría o una puesta a tierra eléctrica.
Enciende el multímetro y ajústalo para poder leer resistencias.
Probar los del tipo de enriquecimiento
- Pon una de las puntas de prueba del instrumento en el terminal de drenaje (D) del MOSFET y la otra en el terminal de fuente (S). Lee la resistencia en la pantalla del instrumento. Invierte las puntas de prueba y lee la resistencia. En ambos casos, deberías leer un valor de resistencia infinito.
- Toca con la punta de prueba roja o positiva el terminal de compuerta (G) del MOSFET. Toca con la punta de prueba negra o negativa el terminal de drenaje (D) y registra la lectura de la resistencia. Toca con la punta de prueba negra el terminal de fuente (S). Ambas lecturas deberían indicar un valor infinito de resistencia.
- Coloca la punta de prueba negra en el terminal de compuerta (G). Toca con la punta de prueba el terminal de fuente (S) y registra el valor de resistencia. Toca con la punta de prueba roja el terminal de drenaje (D) y lee el valor de resistencia de la pantalla del instrumento. Ambas lecturas deberían indicar una resistencia infinita. Si el dispositivo falla en cualquiera de estas pruebas, deberás reemplazarlo.
Probar los del tipo de agotamiento
- Coloca una de las puntas de prueba en el terminal de drenaje (D) del MOSFET y la otra punta en el terminal de fuente (S). Registra el valor de resistencia del instrumento. Invierte la posición de las puntas y registra nuevamente el valor. En ambos casos deberías leer el mismo valor de resistencia.
- Toca con la punta de prueba color rojo (positivo) en el terminal de compuerta (G) del MOSFET. Toca con la punta de prueba negra el terminal de drenaje (D) y registra el valor de resistencia leído. Toca con la punta de prueba negra el terminal de fuente (S) y lee la resistencia. Ambas lecturas deberían mostrar una resistencia infinita.
- Conecta la punta de prueba negra al terminal de compuerta (G) tocándolo con ella. Toca el terminal de fuente (S) con la punta de prueba roja y registra el valor de la resistencia. Toca con la punta de prueba roja el terminal de drenaje (D) y lee la resistencia en la pantalla del instrumento. Ambas lecturas deben ser de un valor infinito de resistencia. Si el dispositivo falla en cualquiera de estas pruebas, deberás reemplazarlo.
Fuente: http://www.ehowenespanol.com/probar-mosfets-multimetro-como_4367
Tengo unos drivers (Stepsticks / Clones Pololu) con dos potenciómetros
Son clones de Pololu, igual que los Stepsticks, tienes mas información aquí:
http://reprap.org/wiki/G3D_driver
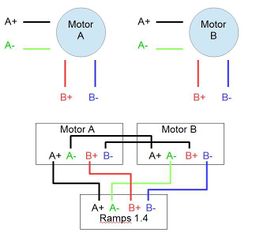
¿Cómo puedo conectar los motores del eje Z en serie? y ¿por qué hacerlo así?
Muchos modelos de impresoras RepRap (por no decir todos) usan dos motores en el eje Z, normalmente se conectan en paralelo y se necesita proporcionarles el doble de intensidad que a un solo motor. Conectarlos en serie permite poder usar los dos motores con la intensidad "normal" que usaria un motor solo, pero con la mitad de corriente. Como este eje no necesita velocidades altas para funcionar, el conectarlos en serie nos permite que el driver trabaje con menor intensidad y por lo tanto se calentara menos y "sufrirá" menos.
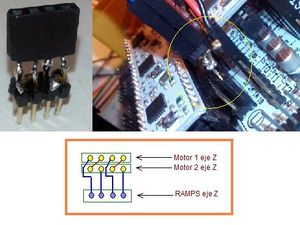
Una forma sencilla de realizar esta conexión es creándonos un adaptador como se puede ver en esta imagen cortesía de Errotico.
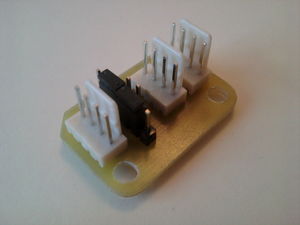
También podemos usar una placa hecha por nosotros mismos, en la cual seleccionamos si los motores van en serie o en paralelo con unos «jumpers». Esta placa ha sido creada por Xoan Sampaiño, gracias prusador!! Tenéis toda la información para montarla aquí.
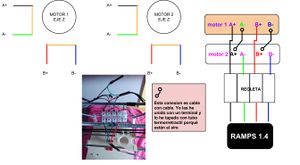
Para quien no tenga zócalos otra opción es una sencilla regleta. La conexión se realiza como la siguiente imagen cortesía de Cristian Rodríguez.
Otro esquema más, para la conexión de los motores. Gracias a Pere Gonzalez.




Se me apaga la cama caliente
A veces algunos equipos dejan de calentar la cama después de un rato. La causa es que algunas de las camas tienen una resistencia inferior (0.7ohm) a lo normal (entorno a 1 ohm) de modo que pasa demasiada corriente y la protección (polyfuse amarillo) corta la corriente cuando se calienta en exceso (cuando se calienta el fusible, no la cama, pero ambos van a la par en este caso).
Aunque una solución que ya se ha comentado en el foro es añadir un relé, las últimas versiones de Marlin incorporan la posibilidad de realizar una limitación de la corriente que se entrega a la cama (modulando con PWM de baja frecuencia).
El parámetro en concreto está en la línea 198 del Configuration.h
- define MAX_BED_POWER 150 // esto lo fija a 3/5 de la corriente máxima
De este modo el fusible no salta y la cama se va calentar y mantener caliente sin problema (el ajuste 150 puede variar según la resistencia de la cama).
Si quieres probar con nuestra versión ya configurada ... [1]
Aportado por Miguel Sánchez (Misan) en este post de la lista de correos de Clone Wars:
Uso del autotune para estabilizar las temperaturas del extrusor y la cama
Se ha introducido una mejora llamada PID tunning, para realizar un calibrado del uso de corriente mediante un mecanismo de control llamado PID, "Proporcional integral derivativo" (para más info wikipedia).
Su uso es mediante el G-code M303.
- Con el extrusor a temperatura ambiente, mandar el comando M303 E-0 S<temperatura> C<nº de ciclos>
PID Autotune start
bias: 72 d: 72 min: 215.00 max: 231.44
bias: 71 d: 71 min: 214.38 max: 224.29
bias: 67 d: 67 min: 215.00 max: 224.29
Ku: 18.37 Tu: 38.40
Clasic PID
Kp: 11.02
Ki: 0.57
Kd: 52.92
bias: 65 d: 65 min: 215.00 max: 224.29
Ku: 17.83 Tu: 39.19
Clasic PID
Kp: 10.70
Ki: 0.55
Kd: 52.39
bias: 67 d: 67 min: 215.10 max: 223.57
Ku: 20.15 Tu: 37.62
Clasic PID
Kp: 12.09
Ki: 0.64
Kd: 56.85
PID Autotune finished! Put the Kp, Ki and Kd constants into Configuration.h
Ahora sólo falta guardar los últimos datos obtenidos. Como el propio comando dice se debe modificar el fichero Configuration.h y resubir el firmware. Aunque también es posible añadir el comando M301 P<Kp> I<Ki> D<Kd> al comienzo del G-Code en cada impresión.
Para la cama, sería los comandos M303 E-1 S<temperatura> C<nº de ciclos> y M304 P<Kp> I<Ki> D<Kd>.
La pantalla LCD se enciende pero solo funciona (muestra caracteres) si conecto la electronica por USB al PC (Con RAMPS)
Ese problema es síntoma de que el regulador de tensión del Arduino MEGA 2560 (o similares) esta achicharrado, lo mejor es cambiarlo por el mismo modelo si se puede (AMS1117) si no se dispone de uno igual, podemos sustituirlo por uno mas comun como el 7805, que se encuentra muy facilmente en cualquier tienda de electronica.
Aqui teneis una foto donde se ve claramente los pines de cada uno para saber como realizar la soldadura. Gracias a Narci Soto!! ;)

Firmware
Sprinter
Marlin
El homming del eje Z varía de altura cada vez que se ejecuta
Si al hacer homming en el eje Z vemos que cada vez que lo hacemos cambia de altura como en este video:
La solución es ir a la pestaña Configuration_adv.h y cambiar el parámetro siguiente:
define Z_HOME_RETRACT_MM 1
cambiamos el valor 1 por 2 para que quede de la siguiente forma:
define Z_HOME_RETRACT_MM 2
Los motores giran un poco y se bloquean
Si acabas de instalar Marlin y los motores te giran un poco y después se quedan bloqueados, puede ser por la aceleración que trae configurada Marlin. La forma de reducir la aceleración de los motores es cambiando los siguientes parámetros en la pestaña de "Configuration.h":
define HOMING_FEEDRATE {50*60, 50*60, 4*60, 0} // set the homing speeds (mm/min)
define DEFAULT_MAX_ACCELERATION {3000,3000,100,10000} // X, Y, Z, E maximum start speed for accelerated moves. E default values are good for Skeinforge 40+, for older versions raise them a lot.
El primero define la velocidad para hacer el homing, y el segundo define las aceleraciones máximas de los movimientos.
Errores a la hora de compilar
- Si has cambiado el valor del puerto en la variable "#define SERIAL_PORT 0" por el puerto COM de tu RAMPS, vuelve a ponerlo a 0 porque ese valor no está relacionado realmente con eso.
- Si has configurado el LCD y has cambiado el lenguaje a español, hay que añadir la siguiente variable al archivo language.h en la sección español:
- define MSG_Z_MAX "z_max: " (añadirla debajo de la de Y_MIN por ejemplo)
La opción "COOLDOWN" de la pantalla LCD sólo desconecta el hotend y no la heatbed
Este problema es debido a que no se admite el envío de un GCODE múltiple en una sola línea de comandos, la única opción de momento es definir un parámetro para desconectar el hotend y otro la heatbed, para ello:
- Buscamos en el archivo ultralcd.cpp la siguiente línea:
- MENU_ITEM(gcode, MSG_COOLDOWN, PSTR("M104 S0,nM140 S0"));
- Y la sustituimos por estas dos:
- MENU_ITEM(gcode, MSG_COOLDOWN, PSTR("M104 S0"));
- MENU_ITEM(gcode, MSG_COOLHB, PSTR("M140 S0"));
- Ahora vamos al fichero language.h y buscamos donde se define MSG_COOLDOWN en el idioma que tengamos configurado y sustituimos esa línea por estas dos:
- define MSG_COOLDOWN "Cool Hotend" (si lo tienes en español pues ya pones Enfiar hotend o Enfiar HE, al gusto de cada uno, igual con el otro valor)
- define MSG_COOLHB "Cool Heatbed"
El relé de la cama caliente conecta y desconecta repetidamente
Si tu cama caliente usa un relé, y al encenderla el relé conecta y desconecta intermitentemente varias veces por minuto como en este video, debes editar el archivo Configuration.h y establecer la variable MAX_BED_POWER en 256 de esta forma:
#define MAX_BED_POWER 256
Ajustar precisión del encoder al cambiar variables del firmware
Si cuando giras un click del encoder el firmware cambia en dos (o más) unidades la variable que estas tratando de corregir (i.e. si al cambiar la temperatura del nozzle, giras un click el encoder, pero sube/baja 2ºC) puedes seguir el siguiente proceso para cambiar la configuración del firmware Marlin para que cada click del encoder se corresponda a un cambio de una única unidad:
Se añade esta línea en la fila 80 del archivo ultralcd.cpp:
#define ENCODER_SCALE 2
Se va a la línea 892 (ahora 893, después de haber añadido la línea anterior) y se cambia:
encoderPosition += encoderDiff;
por:
encoderPosition += encoderDiff/ENCODER_SCALE;
Ajustar el número de clicks del encoder necesarios para moverse a la siguiente opción de menú
Se cambia el valor de la variable que hay en la línea 82 del archivo ultralcd.cpp:
#define ENCODER_STEPS_PER_MENU_ITEM 1
Este valor lo podemos ajustar de forma se lo incrementamos disminuimos la sensibilidad para que haya que dar varios clicks para cambiar de línea de menú.
¿Cómo editar la página de inicio de una GLCD?
- Tutorial (en inglés)
¿Cómo utilizar cables planos largos en el LCD y que la tarjeta SD siga funcionando?
Cuando usamos cables planos largos de más de 50 cm, nos encontramos con el problema de que al LCD le es imposible inicializar la tarjeta SD. En el programa host como Pronterface obtendríamos el mensaje 'Volumen.init failed'.
Para solucionarno, los cables, por separado (son dos cables planos de 10 hilos cada uno), los envolveremos con papel de aluminio(3 vueltas) y a este papel de aluminio le colocaremos(pegado con cinta aislante o celofan) un cable pelado unos 3cm que posteriormente conectaremos a masa ( O Voltios).

Recomendamos envolver después los cables con cinta aislante o plástico de cocina (film) para evitar posibles cortos no deseados.
Software / host
Al intentar hacer movimientos con el GCODE G1, los desplazamientos no corresponden
Si al dar un comando G1 en Pronterface (por ejemplo, G1 Z100) el desplazamiento parece no corresponder a lo que le estás diciendo, verifica si estás utilizando coordenadas absolutas o relativas. Para poner coordenadas relativas, usa el comando G91.
El software que utilizo como host se desconecta de forma inesperada durante una impresión
Comprueba la conexion entre la electronica y el ordenador. Cambia el cable USB por otro para probar, si puede ser de los que incluyen ferritas en los extremos. Comprueba tambien la configuracion de ahorro de energia de los puertos USB. Revisa que no tengas opciones de hibernacion activadas en tu equipo. Comprueba que los baudios del puerto COM que estes usando sean los mismos que tienes configurados en el firmware y si es necesario reducelos, lo mismo en el software que uses como host. Se han dado casos, en casas con una instalacion electrica vieja o deficiente, de gente a la que se le desconectaba la electronica al pulsar ciertos interrumptores de la luz de alguna habitacion o al encender ciertos aparatos... comprueba que no sea el caso.
Cura - Plugins
Para aquellos usuarios del programa Cura que quieran añadir opciones especiales, se pueden usar diferentes plugins de la wiki oficial en Ultimaker.
Algunos de estos plugins son:
- Cambiar el centro de la cama, para que imprima en otro punto: XYZshift
- Pausar impresión a una altura dada para cambiar de filamento: ChangeFilamentAtZ y Filamentatz
- Cambiar la temperatura de la cama a partir de una altura: Bedtempatz
Tengo Ubuntu de 64 bits y no encuentro los .deb para el Arduino 0022
Los paquetes de arduino 0022 en .deb para ubuntu 64 bits están aquí:
¿Cómo puedo crear accesos directos en Ubuntu / Debian?
Existen diversas formas de crear accesos directos a las aplicaciones dentro de Ubuntu / Debian (es posible que funcione en otras distribuciones de Linux, pero no está comprobado) como pueden ser Pronterface o Slic3r. Para ello, podéis descargar el siguiente archivo [4], darle permiso de ejecución y ejecutarlo en una terminal, o bien seleccionar "Ejecutar en un terminal" al hacer doble click sobre el fichero para ejecutarlo. Si alguno de los datos introducidos es erróneo, aunque se realice todo el proceso no aparecerá el icono para ejecutar la aplicación en el futuro.
Nota. Para que el acceso directo a Pronterface funcione correctamente, deberás tener permiso para utilizar el puerto USB a través del cual te comunicas con la impresora (habitualmente /dev/ttyACMX o /dev/ttyUSBX). Para ello tendrás que añadir tu usuario al grupo dialout y reiniciar tu sesión.
Diseño/CAD
¿Qué programa puedo usar para el modelado 3D de mis piezas?
Cualquier software de modelado 3D en general que te permita generar archivos .STL
- Software libre:
- Software Privativo:
- Sketchup (Gratuito)
- Catia
- Solid Works
- Tinkercad
¿Tengo que diseñar todo a escala o se puede cambiar a la hora de imprimir?
Efectivamente, la mayoría de programas permiten redimensionar las piezas antes de la impresión.
¿Cómo puedo convertir cualquier imagen a formato STL?
Impresión
¿Qué precisión tiene?
La resolución de las piezas la determinan principalmente dos factores:
- Diámetro del nozzle/hotend/fusor: Es por donde sale el plástico fundido. Un valor bastante común es 0.5mm aunque también se utilizan 0.4mm, 0.35mm o incluso menores, para ganar resolución (a costa de un mayor tiempo de impresión).
- Altura de capa: Cuanto menor sea la altura entre capas, mayor será la resolución. El valor varía normalmente desde 0.1mm hasta 0.4mm, y se puede cambiar desde el software de impresión.
Aquí puedes encontrar imágenes de diversos objetos para hacerte una idea de la resolución. De todos modos, lo mejor es verlas en directo :)
¿Hasta qué tamaños se puede imprimir?
El tamaño de impresión depende del modelo de impresora utilizado.
La impresión se desplaza horizontalmente a la mitad (las piezas salen torcidas)
Mira que las correas de los ejes X e Y (dependiendo de la dirección del desplazamiento) estén bien apretadas, así como los tornillos de los engranajes de los motores. Asegúrate de haber aplanado los ejes de los motores.
Propiedades del material ¿Qué es mejor, PLA o ABS?
Parece una pregunta sencilla y obvia, pero la respuesta no lo es. Ambos son buenos, y ambos tienen sus ventajas.
Pros
- ABS
- Algo más duradero
- Más flexible
- Más resistente a las altas temperaturas
- Se disuelve con Acetona. Esto permite pegar piezas fácilmente, arreglarlas y modificar su aspecto
- Se trata fácilmente con vapor de acetona para conseguir piezas con un acabado muy liso y brillante
- PLA
- Huele bien
- Más rígido/duro
- Natural y reciclable (bajo las condiciones adecuadas)
- No es necesario tener heatbed para la mayoría de las piezas (aunque el uso de una heatbed te dará mejores resultados)
- Disponible en colores translúcidos
- Apenas se contrae al enfriar, por lo que se adhiere muy bien a la base. Se nota muchísimo al imprimir piezas grandes
- En genera, es más fácil empezar a imprimir con PLA (mejor adherencia, no se curva, menor temperatura...)
Contras
- ABS
- Las piezas se arquean si no se usa una heatbed
- Olor desagradable (esto varía dependiendo de la persona, la temperatura de extrusión y la formulación del ABS usado)
- No biodegradable o reciclable
- Menos adhesivo o pegajoso cuando está fundido, por lo que las velocidades máximas de impresión son inferiores
- PLA
- Más higroscópico, es decir, que absorbe más humedad (no es un problema importante salvo quizás en zonas con mucha humedad. El ABS también presenta este problema pero es menos severo)
- Punto de fusión inferior
- Más frágil (aunque suele ser suficientemente resistente para la vasta mayoría de aplicaciones)
Precio del material
El precio del ABS/PLA suele estar en torno a los 20€/Kg, pero depende bastante del proveedor. Mira la lista de tiendas para compararlos.
¿Filamento de 1.75mm ó 3mm?
El consenso general dice que 3mm es más sencillo de imprimir y 1.75mm da mejor calidad de impresión, pero hay gente que consigue resultados sorprendentes con el filamento de 3mm. Se aconseja comenzar con el filamento de 3mm y experimentar con 1.75mm una vez que se empiece a buscar el «límite» de la impresora.
Un pequeño consejo: si te decides por el filamento de 1.75mm. Cómpralo siempre en rollos. Una maraña de filamento de 1.75mm es una pesadilla.
Cómo insertar o extraer el filamento
- Insertando
- Afloje los tornillos con los muelles del extrusor.
- Inserte el filamento suavemente con la mano hasta que no se mueva.
- Establezca la temperatura de extrusión a 185ºC para PLA y 230ºC para ABS.
- Cuando se alcance la temperatura, empuje suavemente con la mano el filamento hacia abajo hasta que salga por la boquilla.
- Apriete los tornillos con los muelles del extrusor.
- Pruebe la extrusión mediante el programa instalado.
- Extrayendo
- Afloje los tornillos con los muelles del extrusor.
- Establezca la temperatura de extrusión a 130ºC para PLA y 185ºC para ABS.
- Cuando se alcance la temperatura, tire del filamento hacia arriba con la mano.
- Desconecte de inmediato la alimentación del fusor o Hot end.
Cómo cambiar de ABS a PLA y viceversa
- Digamos que usted imprime con ABS.
- Fijar temperatura a 230 º C.
- Afloje y retire todo el filamento de ABS (ver "insertar / extraer filamento)
- Inserte el PLA
- La temperatura es de 230ºC
- Empuje suavemente el filamento hasta que salga por el nozzle.
- Cambie la temperatura para extruir PLA (185ºC).
- Apriete los tornillos con muelles del extrusor y haga una prueba.
- Digamos que usted imprime con PLA.
- Fijar temperatura a 185ºC
- Afloje y retire todo el filamento de PLA (ver "insertar / extraer filamento).
- Inserte el ABS.
- Cambie la temperatura para extruir ABS (230ºC).
- Empuje suavemente el filamento hasta que salga por el nozzle.
- Apriete los tornillos con muelles del extrusor y haga una prueba.
|
|
Proyecto Clone Wars |
Otras guías
- Guía de solución de problemas. Pequeña guía sobre fallos comunes en las primeras horas de impresión.
- Guía de Principiantes de RepRap Una muy buena ayuda si estas empezando para tener una idea general de lo relacionado con la impresión 3D, aunque esta algo "anticuado", merece la pena.
- Manual de introducción a OpenScad. Introducción al diseño 3D en OpenScad ( Español | pdf | 650kB )
- Poleas y Correas. Artículo muy bueno sobre las correas y poleas que conviene utilizar para las impresoras 3D (en inglés)
- Flow Rate Como ajustar la cantidad de plástico que sale por el hotend. (Inglés)
- Calibración La guia de calibración de RepRap. (Inglés)
- Guía problemas comunes Guía de solución de los problemas mas comunes en la impresión.
- Otra guía de solución de problemas pero en ingles.