Prusa i3 Hephestos/es
|
English • العربية • български • català • čeština • Deutsch • Ελληνικά • español • فارسی • français • hrvatski • magyar • italiano • română • 日本語 • 한국어 • lietuvių • Nederlands • norsk • polski • português • русский • Türkçe • українська • 中文(中国大陆) • 中文(台灣) • עברית • azərbaycanca • |
Release status: working

| Description | |
| License | |
| Author | |
| Contributors | |
| Based-on | |
| Categories | |
| CAD Models | |
| External Link |
Contents
- 1 Introducción
- 2 Características técnicas
- 3 Variaciones con respecto a otros modelos de Prusa i3
- 4 Piezas impresas
- 5 Lista de materiales
- 6 Guía de Montaje
- 6.1 Herramientas necesarias no incluidas en la lista de materiales
- 6.2 Preparación previa al montaje
- 6.3 Montaje de los ejes
- 6.3.1 Eje X
- 6.3.1.1 Introducir los rodamientos
- 6.3.1.2 Preparar el tensor del Eje X
- 6.3.1.3 Introducir el tensor del Eje X
- 6.3.1.4 Meter los rodamientos en las varillas lisas
- 6.3.1.5 Preparar el sensor final de carrera del Eje X
- 6.3.1.6 Introducir el sensor final de carrera del Eje X en la varilla lisa
- 6.3.1.7 Introducir el sensor final de carrera del Eje X en la varilla lisa
- 6.3.1.8 Introducir las varillas lisas en las piezas laterales
- 6.3.1.9 Montar el motor del Eje X
- 6.3.1.10 Introducir el tornillo de ajuste para el sensor final de carrera del Eje X
- 6.3.1.11 Introducir la polea en el motor del Eje X
- 6.3.2 Eje Z
- 6.3.2.1 Acoplar la sujeción del motor al marco
- 6.3.2.2 Acoplar los motores del Eje Z
- 6.3.2.3 Acoplar la sujeción superior de las varillas lisas
- 6.3.2.4 Preparar el sensor final de carrera del Eje Z
- 6.3.2.5 Unión del Eje X con Eje Z: Introducir varillas roscadas
- 6.3.2.6 Unión del Eje X con Eje Z: Introducir varillas lisas
- 6.3.2.7 Unión del Eje X con Eje Z: Unión con el Eje X
- 6.3.2.8 Unión del Eje X con Eje Z: Acoplamientos flexibles
- 6.3.2.9 Unión del Eje X con Eje Z: Sensor final de carrera del Eje Z
- 6.3.3 Eje Y
- 6.3.3.1 Preparación de las varillas roscadas M10
- 6.3.3.2 Preparación de las varillas lisas
- 6.3.3.3 Unión de las varillas lisas con las varillas roscadas
- 6.3.3.4 Fijar con tuercas
- 6.3.3.5 Fijar con bridas
- 6.3.3.6 Preparación del tensor del Eje Y
- 6.3.3.7 Preparación del motor del Eje Y
- 6.3.3.8 Preparación de las varillas roscadas M8 - Parte 1
- 6.3.3.9 Preparación de las varillas roscadas M8 - Parte 2
- 6.3.3.10 Unión de las varillas
- 6.3.3.11 Fijar con tuercas la estructura
- 6.3.3.12 Preparar el sensor final de carrera
- 6.3.3.13 Anclar el sensor final de carrera en la base
- 6.3.3.14 Colocar la correa del Eje Y
- 6.3.3.15 Apretar todas las tuercas
- 6.3.3.16 Colocar la base de metacrilato
- 6.3.3.17 Preparar el sensor final de carrera del Eje Y en el marco
- 6.3.3.18 Anclar el sensor final de carrera del Eje Y en el marco
- 6.3.3.19 Unión del Eje Y con los Ejes X y Z: Encajar ejes
- 6.3.3.20 Unión del Eje Y con los Ejes X y Z: Ajustar y apretar tuercas
- 6.3.4 Extrusor
- 6.3.5 Electrónica
- 6.3.5.1 Instalar la RAMPS 1.4
- 6.3.5.2 Preparar el panel de control LCD
- 6.3.5.3 Montar el panel de control LCD en el marco
- 6.3.5.4 Meter los cables en la cadenenta del Eje X
- 6.3.5.5 Colocar la cadeneta del Eje X
- 6.3.5.6 Meter los cables del Eje Z y colocar la cadeneta del Eje Z
- 6.3.5.7 Preparar el ventilador
- 6.3.5.8 Conexionado y guiado de los cables
- 6.3.5.9 Colocar el ventilador
- 6.3.5.10 Colocación del soporte para la bobina de filamento
- 6.3.1 Eje X
- 6.4 Ajustes de impresión
- 6.5 Hola mundo: Tu primera impresión
- 6.6 Anexos
Introducción
- La impresora 3D Prusa i3 Hephestos es un proyecto libre desarrollado por el departamento de Innovación y Robótica de bq. Hephestos toma la base de la Prusa i3 y añade varias mejoras extraídas de otras impresoras como la PowerCode, usuarios de la comunidad RepRap, modificaciones de estas piezas y diseños propios del departamento.
- Con este proyecto se ha buscado ofrecer un diseño de impresora que soluciona varias de las carencias de los diseños anteriores como la sujeción de los finales de carrera y el guiado de los cables.
Características técnicas
Dimensiones
- -Dimensiones impresora: (x)460 x (y)370 x (z sin rollo)510 (z con rollo)583 mm
- -Dimensiones área de impresión: (x)220 x (y)220 x (z)180 mm
- -Dimensiones caja: (x)400 x (y)400 x (z)250mm
Mecánica general
- -Marco y base de acero pintado al polvo
- -Barras de cromo duro para los carros X, Y, Z
- -Rodamiento lineal de bolas LM8UU para X, Y, Z
- -Rodamiento axial de bolas B623ZZ para las poleas X, Y
- -Cadenas portacables Igus
- -Acoplamientos flexibles para las varillas roscadas del eje Z
- -Sistema de nivelado de base de impresión con 4 puntos y amortiguación
- -Sistema de cambio rápido de base de impresión con Clips
- -Ventiladores brushless axiales con rodamientos de bolas.
Resolución de impresión
- -Muy alta: 60 micras
- -Alta: 100 micras
- -Media: 200 micras
- -Baja: 300 micras
Mecánica extrusor
- -Extrusor de diseño propio
- -Boquilla de 0.4mm
- -Disipador de aletas con ventilador axial
- -Tobera de refrigeración de pieza
Velocidad de impresión
- -Velocidad recomendada: 50 mm/s
- -Velocidad máxima recomendada: 80 mm/s
Electrónica
- -Ramps 1.4
- -Mega 2560
- -Pantalla de LCD con encoder rotativo y con pulsador para la navegación
- -Base fría de cristal tamaño 220 x 220 x 3 mm
- -Fuente de alimentación de 220 AC 12 DC 100W
- -Termistor 100k en extrusor
- -Cartucho calefactor 40W 12V
Software
- -Firmware derivado de Marlin
- -Entorno recomendado: Cura Software
- -Archivos admitidos: .gcode
- -OS compatibles:
- Windows XP y superiores
- Mac OS X y superiores
- Linux
Comunicaciones
- -Lector de tarjetas SD estándar
- -Puerto USB tipo B
Materiales
- -Filamento PLA de 1.75 mm
Variaciones con respecto a otros modelos de Prusa i3
- Sujeción finales de carrera:
- Diseñados por el departamento expresamente para éste modelo.
- Tensores de correas
- Tensor eje X idéntico al de la Power Code. Tensor del Eje Y, descargado de thingiverse http://www.thingiverse.com/thing:6818.
- Soporte para la RAMPS
- Diseñado por el departamento expresamente para éste diseño. Incluye tres anclajes para recoger los cables en un lateral con bridas, guiándolos de tal forma que no tapan los disipadores de los Drivers.
- Soporte LCD
- Diseñado expresamente por el departamento para éste modelo. El diseño ha sido inspirado en http://www.thingiverse.com/thing:121640
- Soporte Ventilador
- Diseñado por el departamento expresamente para éste modelo.
- Cadenetas recogecables
- Piezas modificadas para incluir las cadenetas en todos los ejes, evitando pinzamientos, cortes y pillado de los cables con el movimiento de los ejes.
- Fuente Alimentación
- Transformador de PC portátil
- Extrusor
- El mismo que la Witbox
- Marco
- Oficial de Prusa modificado. Posee un rebaje en la zona del eje Y para evitar que pueda existir rozamiento una vez finalizada la nivelación de la base si el tornillo sobresale.
- Volumen de Impresión
- 22x22x18 cm
Piezas impresas
Diseños propios
Modificadas
Listado completo
Lista de materiales
Herramientas
Pieza Nombre Cantidad Descripción 
LLave Allen larga Ø 2 mm 1 - 
LLave Allen larga Ø 2.5 mm 1 - 
Destornillador cerámico trimmer 1 Destornillador cerámico trimmer para el ajuste de la corriente de los drivers de los motores paso a paso bipolares Nema 17 y extrusor. [[File:|100px|]] Aguja acupuntura 0.32 x 100mm 2 Necesaria para el mantenimiento del hotend, previene atascos del mismo. 
Llave fija impresa 10 (M6) - 13 (M8) - 17 (M10) 1 LLave fija impresa para el montaje de tuercas M6, M8 y M10 (correspondencia con llaves 10, 13 y 17).

Electrónica
Pieza Nombre Cantidad Descripción 
Ramps 1.4 1 Freaduino Mega 2560 v1.2. Diseño derivado del Arduino Mega 2560 + Ramps 1.4, con disipador en el MOSFET de la cama caliente 
Stepstick Drivers A4988 1 Stepstick Drivers A4988 de cuatro capas y disipación mejorada del calor para evitar sobrecalentamiento + Disipadores para los drivers ya pegados. 
Final de carrera 3 Final de carrera montad en PCB con LED indicador. 
Panel de Control LCD 1 Panel de Control LCD con lector de tarjetas para impresión autónoma (tarjeta SD no incluida) con cables de 30 cm. 
Cable USB tipo B de 1.8 metros. 1 Cable USB estándar con extremo macho tipo A y macho tipo B de 1.8 metros. 
Cable motor Nema 17 4 Cable de cuatro hilos para motor paso a paso bipolar Nema 17 (2.5A 1.8deg/step) con conector hembra. 
Cable final de carrera 40 cm 2 Cable de 3 hilos para final de carrera con conector de click y hembra de 3 pines de 40 cm de longitud Cable final de carrera 85 cm 1 Cable de 3 hilos para final de carrera con conector de click y hembra de 3 pines de 85 cm de longitud 
Motor Nema 17 4 Motor paso a paso bipolar Nema 17 (2.5A 1.8deg/step) 
Kit cables para extrusor (Cable motor Nema (con conector) + Cable termistor extrusor con conector + Cable para ventilador y blower + Cable cartucho calefactor) 1 Kit cables para extrusor (Cable de cuatro hilos para motor paso a paso bipolar Nema 17 (2.5A 1.8deg/step) con conector JST XHP-6 y conector hembra 4 pines + Cable de dos hilos para termistor del extrusor con conector hembra de dos pines + Cable para ventilador y blower climpados con terminal de manguito + Cable cartucho calefactor climpado con terminal de manguito) 
150 mm de cable flexible de dos hilos bicolor con sección de 1 mm² 1 150 mm de cable flexible de dos hilos bicolor con sección de 1 mm² 
Fuente 220 AC 12 DC 100W 1 Fuente con cable de 1.10m, 100 W con conector Jack 2.1mm (INPUT: 100-240VAC 1,8A 50-60Hz y OUTPUT: 12 VDC 8.0A). 
Cable fuente de alimentación/Red 1 Cable de 1,10m para 220AC con conector Schuko (Macho) y conector IEC-60320-C13 (Hembra). 
Soporte LCD 1 Soporte para la colocación del LCD en la parte superior del marco de aluminio. 
Bisagra LCD 1 Bisagra para el soporte del LCD en la parte superior del marco de aluminio. 
Soporte Ramps 1 Soporte para aislar la electrónica del aluminio del marco. Junto con tres ganchos preparados para la sujeción de cables mediante bridas. 
Soporte Ventilador 1 Soporte para ventilador de 50x50mm. Situado encima de la electrónica para su correcta refrigeración. 
Tornillo M3x10 - DIN-912 Clase 8.8 Negro 4 - 
Tornillo M3x12 Tornillo - DIN-912 Clase 8.8 Negro 2 - 
Tornillo M3 x16 - DIN-912 Clase 8.8 Negro 2 - 
Tornillo M3x20 - DIN-912 Clase 8.8 Negro 4 - 
Tuerca M3 - DIN 934 Clase 8 Negro 12 - 
Tubo termorectráctil negro de Ø 2.5 x 500mm 1 - 
Brida negra 100 x 2.5 mm 10 - 
Ventilador de 50 x 50 mm 1 - 
Adaptador/conector Jack-Ramps 1 Adaptador/conector Jack 2,1mm hembra y Ramps 1.4 con clema de dos terminales. 
Eslabón cadeneta recogecables Igus 52 Eslabón cadeneta recogecables Igus 045.10.018 (medidas externas 15x10mm)



















Extrusor
Pieza Nombre Cantidad Descripción 
Extrusor Witbox 1 Extrusor Witbox (de extrusión directa parra filamento de 1.75mm con boquilla de 0.4mm) 
Soporte Extrusor 1 - 
Seguridad Hot End 1 Esta pieza cubre el Hot End para proteger al usuario de tocarlo cuando está caliente, y así evitar posibles quemaduras. 
Tornillo M4 x 6mm DIN-912 Clase 8.8 Negro 2 - Tornillo M3x10 - DIN-912 Clase 8.8 Negro 2 - Tornillo M3x12 - DIN-912 Clase 8.8 Negro 1 -



Eje X
Pieza Nombre Cantidad Descripción 
Varilla lisa cromada Ø 8mm x 370mm 2 - Tornillo M3x10 - DIN-912 Clase 8.8 Negro 4 - Tornillo M3 x16 - DIN-912 Clase 8.8 Negro 2 - Tornillo M3x20 - DIN-912 Clase 8.8 Negro 2 - 
Tornillo M3x25 - DIN-912 Clase 8.8 Negro 1 - 
Tornillo M6x40mm - DIN 912 Clase 8.8 (con rosca hasta mitad) 1 - Tuerca M3 - DIN 934 Clase 8 Negra 7 - 
Tuerca M5 - DIN 934 Clase 8 Negra 2 - 
Tuerca M6 - DIN 934 Clase 8 Negra 3 - 
Eje X carro A 1 Carro del eje X donde va sujeto el extrusor, adaptado para el uso de cadenetas. 
Eje X carro B 1 Pieza para sujetar la correa del eje X al carro. 
Polea Eje X rodamiento B623ZZ 2 Polea para el eje X dónde se aloja el rodamiento axial de bolas B623ZZ 
Eje X derecha 1 Pieza del extremo derecho del eje x dónde va sujeto el tensor de la correa para dicho eje. 
Eje X tensor Rodamiento B623ZZ 1 Tensor de la correa del eje X donde va alojado junto con la polea el rodamiento axial de bolas B623ZZ 
Eje X izquierda 1 Pieza del extremo izquierdo del eje X dónde va sujeto el motor Nema 17 de dicho eje. 
Eje X acople cadeneta izquierda 1 Acople para la sujeción de las cadenetas recogecables en la pieza del extremo izquierdo del eje X. 
Eje X final carrera 1 Pieza fijadora del final de carrera para su sujeción a la varilla lisa en el eje X. 
Rodamiento axial de bolas B623ZZ 1 - 
Polea de 20 dientes para correa GT2 1 - 
Rodamiento lineal de bolas LM8UU 1 - Brida negra de 100x2.5mm 1 -















Eje Y
Pieza Nombre Cantidad Descripción Varilla lisa cromada Ø 8mm x 340mm 2 - 
Varilla roscada M10x370mm 2 - Varilla roscada negra M8 x 205mm 4 - Tornillo M3x10 - DIN-912 Clase 8.8 Negro 7 - Tornillo M3 x16 - DIN-912 Clase 8.8 Negro 1 - Tornillo M3x20 - DIN-912 Clase 8.8 Negro 1 - Tornillo M3x25 - DIN-912 Clase 8.8 Negro 6 - Tuerca M3 - DIN 934 Clase 8 Negra 7 - 
Tuerca M8 - DIN 934 Clase 8 Negra 22 - 
Tuerca M10 - DIN 934 Clase 8 Negra 12 - 
Arandela M8 - DIN-125 Clase 6 Negra 22 - 
Arandela M10- DIN-125 Clase 6 Negra 12 - Polea Eje Y rodamiento B623ZZ 2 Polea para el eje Y dónde se aloja el rodamiento axial de bolas B623ZZ 
Eje Y sujeta correa 1 Pieza para sujetar la correa GT2 correspondiente al eje Y. 
Eje Y tensor rodamiento B623ZZ 1 Tensor de la correa del eje X donde va alojado junto con la polea el rodamiento axial de bolas B623ZZ 
Eje Y motor 1 Pieza reforzada con tres tornillos para sujetar el motor Nema 17 del eje Y a las varillas roscadas. 
Eje Y esquina 1 Esquinas que componen la base y la estructura del eje Y 
Eje Y final carrera base 1 Pieza colocada en la base del eje Y que Incorpora un tornillo con tuerca M3 para la regulación de la carrera total del eje. Se complementa con la pieza que sujeta el final de carrera al marco. 
Eje Y final carrera marco 1 Pieza que sujeta el final de carrera del eje Y al marco. Se complementa con la pieza de la base que contiene regulación mediante tornillo y tuerca M3. Polea de 20 dientes para correa GT2 1 - Rodamiento lineal de bolas LM8UU 3 - Brida negra de 100x2.5mm 11 - 
Correa GT2 6mmx1m 1 - 
Base y marco de aluminio 1 Base de aluminio pintado al polvo en color negro, con "Prusa i3" troquelado en su parte superior. Con un rebaje realizado en su parte inferior en la zona del eje Y para evitar posibles rozamientos una vez finalizado el proceso de nivelación de la base. 
Base de Metacrilato 1 Base de Metacrilato 220x220x8mm en color negro con Orificios 3.5mm Rodamiento axial de bolas B623ZZ.png 1 - 
Muelle 4 Muelle (largo: 30,5mm ; Diámetro externo: 4,5mm; Grosor alambre: 0.45mm) 
Binder Clip Negro (35x10mm) 4 - Brida negra de 100x2.5mm 11 -















.png)
Eje Z
Pieza Nombre Cantidad Descripción Varilla lisa cromada Ø 8mm x 320mm 2 - Varilla roscada negra M5x300mm 2 - Tornillo M3x10 - DIN-912 Clase 8.8 Negro 16 - 
Tornillo M3 x18 - DIN-912 Clase 8.8 Negro 2 - Tuerca M3 - DIN 934 Clase 8 Negra 2 - 
Eje Z soporte superior 1 Piezas para fijar en la parte superior del marco las varillas lisas cromadas de Ø8mm x 320mm correspondientes al eje Z. 
Eje Z soporte inferior derecha 1 Pieza para sujeción del Motor Nema 17 derecho al marco con alojamiento para la varilla lisa cromada Ø8mm x 320mm. 
Eje Z final carrera 1 Pieza fijadora del final de carrera para su sujeción a la varilla lisa en el eje Z 
Eje Z soporte inferior izquierda 1 Pieza para sujeción del Motor Nema 17 izquierdo al marco con alojamiento para la varilla lisa cromada Ø8mm x 320mm y sujección de cadeneta recogecables. 
Acoplamiento flexible de aluminio de 5 a 5 mm 2 Acoplamiento flexible de aluminio de 5 a 5 mm con 4 prisioneros para ajuste de varillas con llave allen de 2mm Base y marco de aluminio 1 Base de aluminio pintado al polvo en color negro, con "Prusa i3" troquelado en su parte superior. Con un rebaje realizado en su parte inferior en la zona del eje Y para evitar posibles rozamientos una vez finalizado el proceso de nivelación de la base.






Guía de Montaje
Herramientas necesarias no incluidas en la lista de materiales
Pieza Foto 
Soldador y estaño 
Mordaza 
Lima de metal 
Tijeras 
Polímetro




Preparación previa al montaje
Preparar poleas
- Materiales necesarios:
Pieza Nombre Descripción Cantidad Rodamiento axial de bolas B623ZZ - 1 Polea Eje X y Eje Y rodamiento B623ZZ Polea para el eje X y Y dónde se aloja el rodamiento axial de bolas B623ZZ 2
- Montaje:

Step A

Step B

Step C

Step D
Preparación de los motores
- Materiales necesarios:
Pieza Nombre Cantidad Motor Nema 17 4 Lima de metal 1 Mordaza 1
- Montaje:

Step A

Step B

Step C
Embutir tuercas
- Materiales necesarios:
Foto Nombre 
Soldador Pieza - Tuerca

- Texto en negritaMontaje:

Step A

Step B

Step C

Step D

Step E

Step F
- Lista de piezas con tuercas a embutir:
Foto Foto detalle Nombre Descripción Tuerca Cantidad 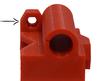
Eje X derecha Pieza del extremo derecho del eje x dónde va sujeto el tensor de la correa para dicho eje. M5 Tuerca - DIN 934 Clase 8 Negra 1 
Eje X izquierda Pieza del extremo izquierdo del eje X dónde va sujeto el motor Nema 17 de dicho eje. M3 Tuerca - DIN 934 Clase 8 Negra 1 
Eje X izquierda Pieza del extremo izquierdo del eje X dónde va sujeto el motor Nema 17 de dicho eje. M5 Tuerca - DIN 934 Clase 8 Negra 1 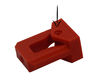
Eje X tensor Rodamiento B623ZZ Tensor de la correa del eje X donde va alojado junto con la polea el rodamiento axial de bolas B623ZZ M3 Tuerca - DIN 934 Clase 8 Negra 1 
Eje Y tensor rodamiento B623ZZ Tensor de la correa del eje X donde va alojado junto con la polea el rodamiento axial de bolas B623ZZ M3 Tuerca - DIN 934 Clase 8 Negra 1 
Eje X carro A Carro del eje X donde va sujeto el extrusor, adaptado para el uso de cadenetas. M3 Tuerca - DIN 934 Clase 8 Negra 2 
Soporte ventilador Soporte para ventilador de 50x50mm. Situado encima de la electrónica para su correcta refrigeración. M3 Tuerca - DIN 934 Clase 8 Negra 2 
Soporte ventilador Soporte para ventilador de 50x50mm. Situado encima de la electrónica para su correcta refrigeración. M3 Tuerca - DIN 934 Clase 8 Negra 2 

Eje Y final carrera base Pieza colocada en la base del eje Y que Incorpora un tornillo con tuerca M3 para la regulación de la carrera total del eje. Se complementa con la pieza que sujeta el final de carrera al marco. M3 Tuerca - DIN 934 Clase 8 Negra 1 
Seguridad Hot End Esta pieza cubre el Hot End para proteger al usuario de tocarlo cuando está caliente, y así evitar posibles quemaduras. M3 Tuerca - DIN 934 Clase 8 Negra 1











Preparación de los cables de los motores
- Materiales necesarios:
Foto Nombre Cantidad Motor Nema 17 4 Cable motor Nema 17 4 Soldador y estaño 1 Tubo termorectráctil negro de Ø 2.5 x 500mm 1
- Longitud de los cables (desde la base del motor al extremo del conector)
Motor Longitud total(cm) Longitud motor(cm) Longitud extesnión(cm) X 85 30 55 Y 50 20 30 Z Derecha 45 15 30 Z Izquierda 65 30 35
- Nota: Cortar cuatro trozos de tubo termoretráctil por cable de motor de unos 2cm de largo.
- Nota: Preparar los motores de los Ejes X e Y antes de montar la Prusa y los motores del Eje Z después de montarla.
- Montaje:

Step A

Step B

Step C

Step D

Step E

Step F

Step G

Step H

Step I

Step J
- Nota: Antes de soldar los cables de los motores del Eje Z, pasa el cable pelado del motor por el agujero.
- Montaje:

Step A

Step B
Preparación del cable de la fuente
- Materiales necesarios:
Foto Nombre Cantidad Tijeras 1 Adaptador/conector Jack-Ramps 1 Fuente 220 AC 12 DC 100W 1 150 mm de cable flexible de dos hilos bicolor con sección de 1 mm² 1
- Montaje:

Step A

Step B

Step C

Step D

Step E
Step F

Step G
Montaje de los ejes
Eje X
Introducir los rodamientos
- Materiales necesarios:
Pieza Nombre Descripción Cantidad Rodamiento lineal de bolas LM8UU - 4 Eje X izquierda Pieza del extremo izquierdo del eje X dónde va sujeto el motor Nema 17 de dicho eje. 1 Eje X derecha Pieza del extremo derecho del eje x dónde va sujeto el tensor de la correa para dicho eje. 1
- Montaje:

Step A

Step B

Step C
Preparar el tensor del Eje X
- Materiales necesarios
Pieza Nombre Descripción Cantidad Eje X tensor Rodamiento B623ZZ Tensor de la correa del eje X donde va alojado junto con la polea el rodamiento axial de bolas B623ZZ 1 
Polea Polea montada en la preparación previa 1 M3x20 Tornillo - DIN-912 Clase 8.8 Negro 1 M6x40mm Tornillo - DIN 912 Clase 8.8 (con rosca hasta mitad) 1
- Montaje:

Step A

Step B

Step C

Step D
Introducir el tensor del Eje X
- Materiales necesarios:
Pieza Nombre Cantidad 
Conjunto del paso 1 1 
Conjunto del paso 2 1 M6 Tuerca - DIN 934 Clase 8 Negra 3
- El objetivo de los tensores es tensar o destensar de una manera cómoda la correa una vez puesta.
- Nota: Hace falta limar un poco las piezas. El tensor debe deslizar perfectamente con la pieza que le alberga.
- Montaje:

Step A

Step B

Step C
- Nota: Las dos tuercas que quedan en el extremo deben apretarse entre sí. Para ello con la ayuda de la llave se aprietan una tuerca contra la otra, de este modo se consigue que estas tuercas queden ::solidarias al tornillo. Ahora al introducir la llave fija como se muestra en la imagen, se consigue una manivela para deslizar linealmente el tensor.

Step D

Step E

Step F
- Nota: Con la ayuda de la llave se aprietan la tuerca y su contratuerca, para conseguir una Palomilla en el tornillo
Meter los rodamientos en las varillas lisas
- Materiales necesarios:
Pieza Nombre Cantidad Varilla lisa cromada Ø 8mm x 370mm 2 Rodamiento lineal de bolas LM8UU 3
- Montaje:
Step A
Step B
Preparar el sensor final de carrera del Eje X
- Materiales necesarios:
Pieza Nombre Cantidad Eje X final carrera 1 Final de carrera 1 M3 Tuerca - DIN 934 Clase 8 Negra 2 M3x10 Tornillo - DIN-912 Clase 8.8 Negro 2
- Montaje:

Step A

Step B
Introducir el sensor final de carrera del Eje X en la varilla lisa
- Materiales necesarios:
Pieza Nombre Cantidad 
Conjunto del paso 4 1 Conjunto del paso 5 1 M3 Tuerca - DIN 934 Clase 8 Negra 2 M3x10 Tornillo - DIN-912 Clase 8.8 Negro 2
- Montaje:
Step A
Step B
Introducir el sensor final de carrera del Eje X en la varilla lisa
Introducir las varillas lisas en las piezas laterales
Montar el motor del Eje X
Introducir el tornillo de ajuste para el sensor final de carrera del Eje X
Introducir la polea en el motor del Eje X
Eje Z
Acoplar la sujeción del motor al marco
Acoplar los motores del Eje Z
Acoplar la sujeción superior de las varillas lisas
Preparar el sensor final de carrera del Eje Z
Unión del Eje X con Eje Z: Introducir varillas roscadas
Unión del Eje X con Eje Z: Introducir varillas lisas
Unión del Eje X con Eje Z: Unión con el Eje X
Unión del Eje X con Eje Z: Acoplamientos flexibles
Unión del Eje X con Eje Z: Sensor final de carrera del Eje Z
Eje Y
Preparación de las varillas roscadas M10
Preparación de las varillas lisas
Unión de las varillas lisas con las varillas roscadas
Fijar con tuercas
Fijar con bridas
Preparación del tensor del Eje Y
Preparación del motor del Eje Y
Preparación de las varillas roscadas M8 - Parte 1
Preparación de las varillas roscadas M8 - Parte 2
Unión de las varillas
Fijar con tuercas la estructura
Preparar el sensor final de carrera
Anclar el sensor final de carrera en la base
Colocar la correa del Eje Y
Apretar todas las tuercas
Colocar la base de metacrilato
Preparar el sensor final de carrera del Eje Y en el marco
Anclar el sensor final de carrera del Eje Y en el marco
Unión del Eje Y con los Ejes X y Z: Encajar ejes
Unión del Eje Y con los Ejes X y Z: Ajustar y apretar tuercas
Extrusor
Preparar el carro
Montar el carro en el Eje X
Asegurar el carro con una brida
Poner la correa del Eje X
Montar el soporte del Extrusor
Montar el Extrusor
Colocar la tobera y el protector
Colocar el cristal de la base
Electrónica
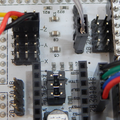
Instalar la RAMPS 1.4
Preparar el panel de control LCD
Montar el panel de control LCD en el marco
Meter los cables en la cadenenta del Eje X
Colocar la cadeneta del Eje X
Meter los cables del Eje Z y colocar la cadeneta del Eje Z
Preparar el ventilador
Conexionado y guiado de los cables
Diagrama de conexionado de cables
Colocar el ventilador
Colocación del soporte para la bobina de filamento
Ajustes de impresión
Ajuste del eje Z
Nivelado de la base
Atasco del extrusor
Hola mundo: Tu primera impresión
Anexos
Carga del firmware
Para cargar un nuevo firmware en la placa sigue los siguientes pasos:
1. Descarga el firmware que quieras cargar. En la Wiki de RepRap podrás encontrar una lista con todos los firmwares disponibles:
Link: http://reprap.org/wiki/List_of_Firmware
2. Estos son algunos de los firmwares más populares junto con el nuestra modificación:
Marlin: http://reprap.org/wiki/Marlin Sprinter: http://reprap.org/wiki/Sprinter Marlin Hephestos: Marlin_Hephestos.zip
3. Descarga e instala el software de Arduino:
Link: http://www.arduino.cc/en/Main/Software
4. Dentro de la carpeta del firmware elegido, abre con la IDE de Arduino el archivo con extensión .ino.
5. Una vez abierto, aparecerá una pestaña con el nombre de configuration.h. Es en este archivo donde podrás cambiar los parámetros de configuración de tu impresora.
6. Cuando esté listo carga el programa dentro de la placa Arduino Mega que está unida a la RAMPS 1.4. Para ello conecta la placa al ordenador mediante el cable USB, selecciona en el IDE de Arduino el puerto serie al que esté conectado la placa y el tipo de placa (Arduino Mega 2560), ambas opciones en el apartado de Herramientas.
Calibración de los drivers
Materiales necesarios
| Pieza | Nombre | Cantidad |
|---|---|---|
 |
Motor Nema 17 | 2 |
 |
Final de carrera | 1 |
 |
Extrusor Witbox | 1 |
 |
Ramps 1.4 | 1 |
 |
Fuente 220 AC 12 DC 100W preparada | 1 |
 |
Polímetro | 1 |
| |
Destornillador trimmer | 1 |
 |
Clema de conexión | 1 |
 |
Cable USB tipo B de 1.8 metros | 1 |
| - | Ordenador con Pronterface | 1 |
Este paso se debe repetir con cada uno de los drivers, necesitando dos motores para el driver del Eje Z.
Intensidad por cada Driver
| Driver | Intensidad (mA) |
|---|---|
| Eje X | 250 |
| Eje Y | 250 |
| Eje Z | 450 |
| Extrusor | 680 |
| Placa | aprox. 74 (no ajustable) |

Conexionado
Es necesario conectar un sensor final de carrera y el termistor debido a las protecciones que lleva el firmware.

Step A
Step B


Preparación del polímetro
Conecta el polímetro en serie con la placa y la fuente de alimentación, y configuralo para medir intensidad (A) en corriente continua.

Step A

Step B


Ajuste del potenciómetro
Conecta la placa al ordenador. Verás que la corriente que circula por la placa es de aproximadamente 74 mA (si es menor no te preocupes, esta medida es propia de cada placa y puede variar). Abre el programa Pronterface (link al final). Desde el programa conecta la placa seleccionado el puerto correspondiente a través de la interfaz.
Para poder medir la corriente que pasa por los motores paso a paso es necesario activar uno a uno los motores para poder observar que intensidad demandan. Para activar un motor es necesario mandar una orden de movimiento desde el programa. Para ello usa las flechas del panel de control desde Pronterface para mover cada uno de los ejes. Mueve el motor del eje correspondiente al driver que se esté calibrando, verás como la corriente que demanda la placa aumenta, es en este momento cuando debes ajustar el potenciómetro usando para ello el destornillador trimmer cerámico. Ajusta el potenciómetro hasta que la intensidad marcada sea la correcta. Ten en cuenta que la corriente que mide el polímetro es la suma de la corriente que demanda la placa por si sola (aprox. 74 mA) y la que demanda el motor correspondiente. Por ejemplo, en el caso del eje X la medida que debe aparecer en el polímetro es de 74 mA más 250 mA, es decir 324 mA.
En el caso del extrusor habrá que pre-calentarlo antes de poder mover su motor, debido a las protecciones que añade el Firmware para evitar una extrusión fría que pueda dañar el motor. Para ello usa el botón Set correspondiente al extrusor (Heat) que se encuentra debajo del panel de control de los ejes.
Cuando se haya calibrado un driver hay que resetear la placa antes de poder calibrar el siguiente. De este modo se medirá solo la intensidad que demanda el driver que se está calibrando.
Step A

Step B
Step C

Step D


Link de descarga de Pronterface: http://reprap.org/wiki/Printrun