FoldaRap Build Manual
|
English • العربية • български • català • čeština • Deutsch • Ελληνικά • español • فارسی • français • hrvatski • magyar • italiano • română • 日本語 • 한국어 • lietuvių • Nederlands • norsk • polski • português • русский • Türkçe • українська • 中文(中国大陆) • 中文(台灣) • עברית • azərbaycanca • |

Tools required
- 1,5 mm Allen wrench (for the pulleys grub screw)
- 2 mm Allen wrench (for M3 counterksunk bolts and pneumatic fittings "MA-12-03-M5")
- 2,5 mm Allen wrench (for normal M3 cap-head bolts and the rounded M4 bolts used for the frame)
- little flat screwdriver (1,5mm) (for the board's screw terminals)
- Philips (PH2) or flat screwdriver (3mm) (for the psu's screw terminals)
You may need also :
- a small pliers and a large one (to tighten the hotend)
- something to cut wires, and something to strip them (knife, automatic striper, etc.)
- iron (for wires, ferules and board terminals)
- a lighter for the heat-shrink sleeves
- small files (round, flat) to eventually ream the printed parts
- a glue gun (gluing the endstop on the printed part is easier/quicker than using bolts)
Overview In case of doubt, don't hesitate to have a look at the 3d model in Sketchup (before/during the build) ! It will show you the folded/unfolded state of the machine and you can play around with it :)
Basically we have a main frame and several sub-assemblies, some can be done in parallel : gather your friends and establish a record of minimum building time !
I tried to make a Gantt diagram for that :

General tips :
- Work on a cutting mat if you have one, it will protect your table plus they often show a millimetre grid that will be useful to check the bolts length (but with some experience you will recognize them just by looking or holding one).
- Place you mouse over a picture in a list if you wonder what part it is
- How to insert a T-nut :
 Tightening torque : 2.5 Nm (+/- 5%)
Tightening torque : 2.5 Nm (+/- 5%)

<videoflash>9CAiVmfO2mk|320|240</videoflash>
Ok let's start It should take between 4 and 20 hours to put everything together, depending of your experience and some sub-assembly that may have been already prepared.
Contents
- 1 Know the parts
- 2 Z-axis
- 3 Rear Base
- 4 Front Base
- 5 Bed-plate
- 6 Y-carriage
- 7 X-motor
- 8 Extruder
- 9 Hotend and thermistor
- 10 Power Supply
- 11 Great ! You are almost done !
- 12 Wiring
- 13 Y-axis (105mm between smooth rods)
- 14 X-axis (30mm between smooth rods)
- 15 Top Frame
- 16 Setting the Z-sliders (242mm between threaded rods)
- 17 X-axis 2/2
- 18 Tidying
- 19 Leveling the bed and zeroing
- 20 Go go go first print !!!
Know the parts
Firstly, have a look at all the part and learn what everything is.
foot-front left
foot-front right
foot-rear left
foot-rear right
hinge-outer left
hinge-outer right
hinge-inner left
hinge-Inner right
z-motor-bracket left
z-motor-bracket right
y-idler
y-carriage and belt-clamp
alternative y-carriage
+ alternative belt-clamp
y-motor
bed insulation and leveling plate
x-end motor
x-carriage
x-end idler
extruder-idler
underplate
board mount
z-top left
z-top right
reprap.org plate


Z-axis
Caution : on the aluminium extrusion some corners are better than others, take care to choose one that slide well for the X-motor and X-idler, keep it in mind then when assembling the Z-right and Z-left.


Right
 x1
x1
 x1
x1
 x1
x1
 x1
x1
 x2
x2
 x2
x2
 x1 (17cm wires for the z-right)
x1 (17cm wires for the z-right)
 x3
x3
 x1
x1
 x1
x1
- vinyl coupling (pushed half-lenght on the motor shaft)


<videoflash>xxfFqePB1qk|320|240</videoflash>
Left


 x1
x1
 x1
x1
 x1
x1
x1
x2
x2
x1 (25cm wires for the z-left)
x3
x1
x1
 x1 (with 25cm blue wires for z-endstop, fix with an m3x8 or simply use a glue gun)
x1 (with 25cm blue wires for z-endstop, fix with an m3x8 or simply use a glue gun)
- vinyl coupling (pushed half-lenght on the motor shaft)
<videoflash>E0LTPixdv0M|320|240</videoflash>
Rear Base


 x1
x1
 x1
x1
 x2
x4
x2
x4
x8
x8
<videoflash>R-FKKoWC1hw|320|240</videoflash>
tips : use the other extrusion when adding the two first nuts

Front Base


 x1
x1
 x1
x2
x1
x2
x8
x8
x1 (with 32cm green wires for y-endstop, fix with an m3x12 and m3 nut or glue gun)
<videoflash>zFjVM068mtI|320|240</videoflash>
y-idler
 x2
x2
x2
x2
x1
 x2
x2
 x2 (603zz)
x2 (603zz)
<videoflash>VHMia_wi4TQ|320|240</videoflash>






Bed-plate
 x1
x1
 x1
x1
 x4
x4
x4
x4
(m3x10 is fine, but the m3x12 allow you to eventually add a sheet of insulation above the wood plate)
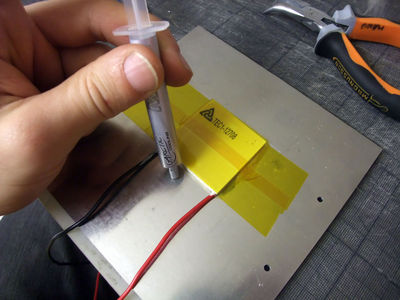
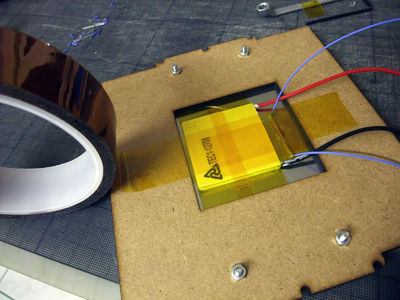
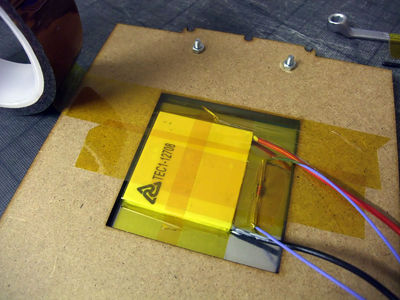
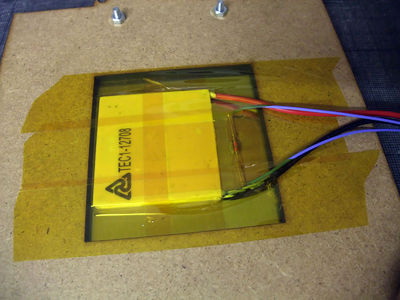
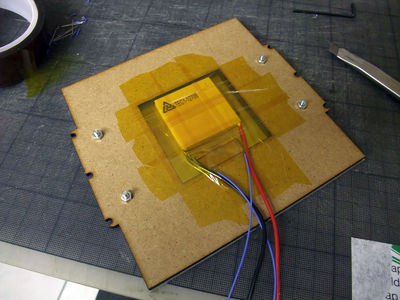
- alu plate
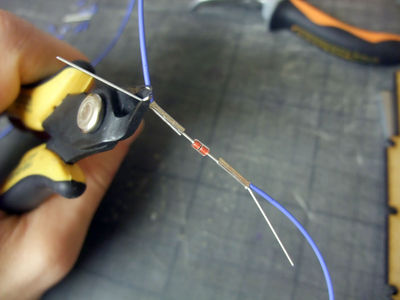
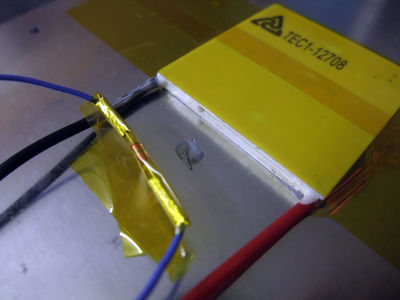
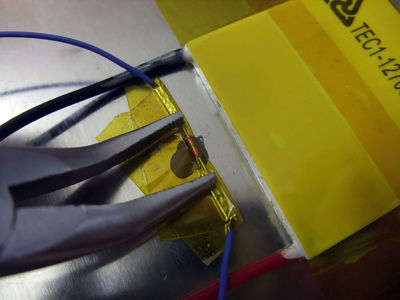
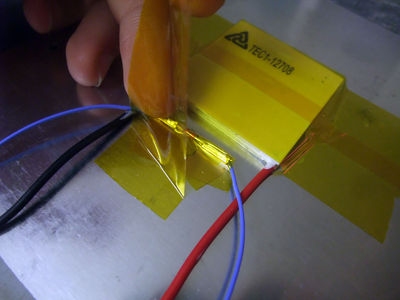
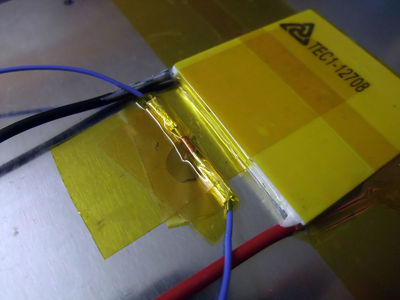
- thermistor (26awg blue 30-35cm, ferules, kapton)
- kapton
<videoflash>cq9UrSuX4wo|320|240</videoflash>
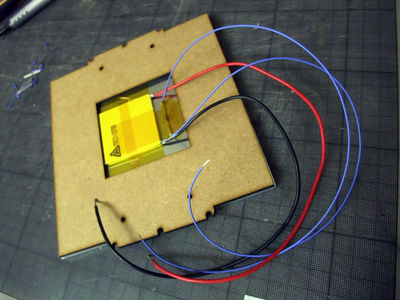
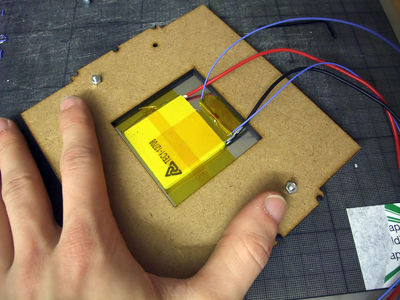
Tip : use the wood plate to center the position of the peltier

Plug the peltier in an adequate power supply (e.g : 12v) to check which side is heating. Don't worry if you put it wrong, you can always switch the cold/hot side by inverting the +/- wires on the board at any moment



















Y-carriage



 x1 or
x1 or  +
+ 
- 600mm belt (pay attention to its length, it's the shortest of the two, as the one for the X axis is 700mm)
 x2
x2
 x3
x3
 x3
x8
x6
x3
x8
x6
 x3 (or LM6UU)
x3 (or LM6UU)
- bed springs x3
- zip-tie x3
+Bed
Tips : if the bearing mount are too loose, you can add a little drop of glue or a very small amount of blue tack in the bearing grooves.
<videoflash>m6JDE4KDay4|320|240</videoflash>
- Clamp the belt in the middle of it's length
X-motor
 x1
x1
 x3
x3
x1 (50cm wires)
x3
x3
x1 (50cm wires)
 x1
x1
x1 (with 50cm red wires for x-endstop, fix with an m3x8 or glue gun)
<videoflash>ffVmqxLEW58|320|240</videoflash>
Extruder



 x1 extruder motor (50cm) or
x1 extruder motor (50cm) or
x2
x3
 x1
x1
 x1
x1
 x1
x3
200px x1
x1
x3
200px x1
x1
x1
(some early versions are using a rubber roller instead)
If your motor came with an aluminium gear, here is how I remove them (M4 bolt+hammer+vice) :
<videoflash>pT2zk--KqBo|320|240</videoflash>
<videoflash>Qw6U9_q8BCo|320|240</videoflash>
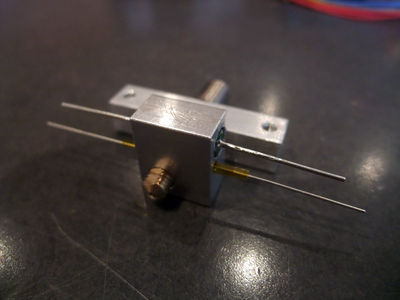
Hotend and thermistor
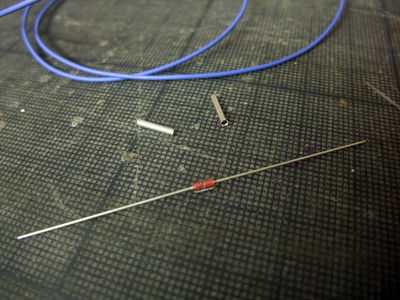
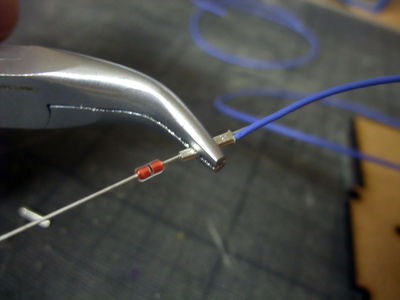
- resistor 60cm 22awg wire
- thermistor 60cm 26awg (or leftover from the motors)
- fan prolongated to match 60cm
<videoflash>tW_CswHS2OM|320|240</videoflash>
This video is the first I made of these series, and is far from perfect (bowden tube goes before the heatsink!). I'll remake it later but for the moment it's better than nothing (and there is always a good doc on the RepRapPro_Huxley_hot_end_assembly)
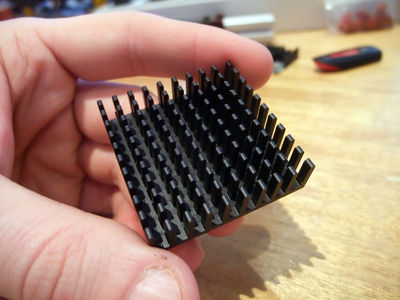
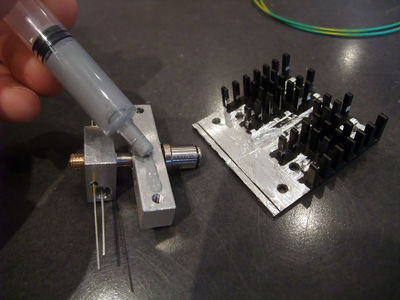
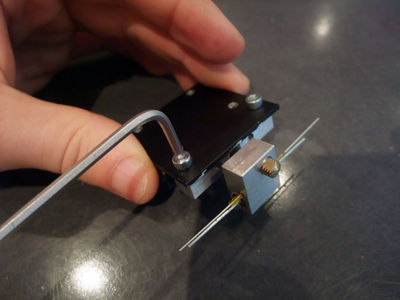
To prepare the heatsink you will need to remove some fins, drill a few holes and file a flat face (can be hand-made with a file, or a dremel or even a cnc)

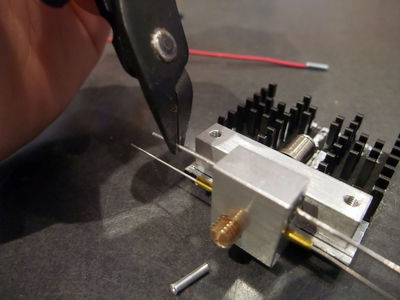
remove the fins by twisting them with a plier (found it easier and less dangerous than using a flush side cutter)
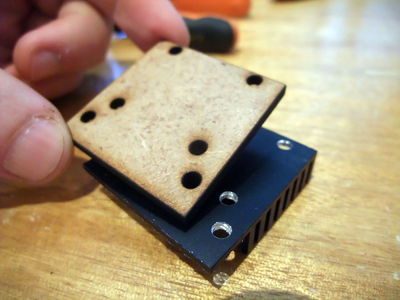
then use a template to drill the holes (for 3mm bolts)
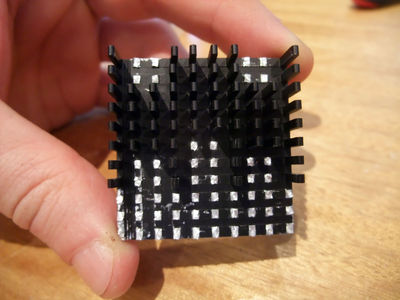
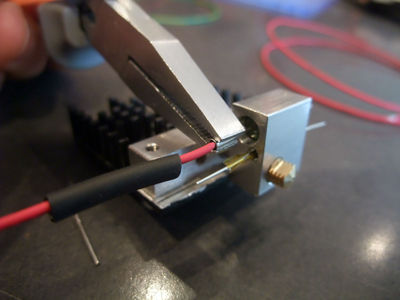
make the bottom of the heatsink flat (until no more black is apparent, like on the picture below) to make a good contact with the aluminium block that will be cooled

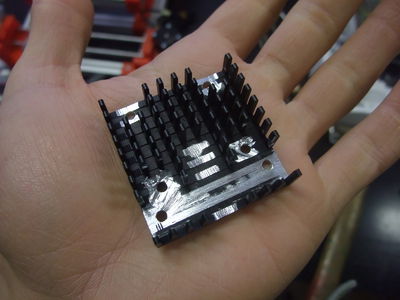
don't forget to put the ptfe tube in the pneumatic fitting, before adding the heatsink (the tube will fit snuggly between the fins)
add heatsink grease
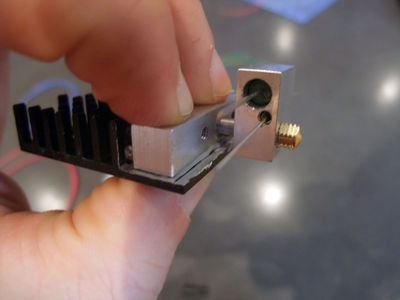
press firmly
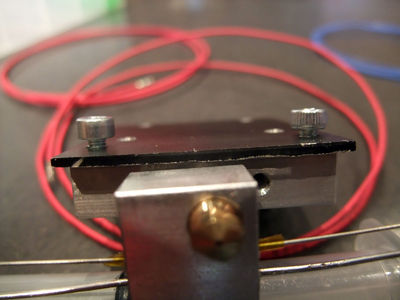
engage both bolts
finish to tighten them (dont require much force as the taped hole is in the aluminium block)













Power Supply
 x1
x6
x6
x1
x6
x6
200px x1
x4
x4
<videoflash>_tXWGjJq0zM|320|240</videoflash>
- Bolt the PSU on the plate, with a washer between the psu and the plate
120W PSU
Which have a slightly different mounting.



mine wasn't labelled, but the order is usually Live/Neutral/Ground




Board
 x1
x3
x1
x1
x3
x1

- Refer to Azteeg_X1
- board
- stepper drivers
It is maybe a good time to check if the stepper drivers are correctly set (see Pololu_stepper_driver_board and SureStep82 user guide) (Vref = 0.4 for the nema14, 0.32 for the PG35L)
You don't need to plug the power supply for that, if you have set the jumper to "usb" instead of "int", the USB connection is enough for this checking phase.
- board to power supply : 8cm red/black wires
<videoflash>o5W4oZXCXOw|320|240</videoflash>
Y-motor



 x1
x3
x3
x1
x3
x3
x1 (15cm wires)
x1
 x1
x1
 x7
x5
x2
x7
x5
x2
- big blue switch
- heatshrink sleeve
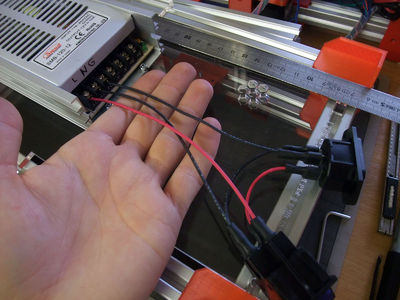
- Power supply to male plug : 1 green wire 18WG of 15cm (35cm for the TXH240), one end with ferule, the other end just stripped
- Switch to power supply : 1 red and 1 black wire 18AWG of 15cm (35cm for the TXH240), one end with ferule, the other end just stripped
- Switch to male plug : 1 red wire of 6cm, 1 black of 9cm 18AWG, both ends with ferule
<videoflash>BiiBkZKw1og|320|240</videoflash>
Great ! You are almost done !
Have a pause, you need to be relaxed for the next step, or you can also just head to the end :)
Wiring
At this stage you should have all of these sub-assembly :

the frame

y-carriage and bed

x-motor and endstop

the extruder and it's idler

the hotend, assembled but nozzle not yet tightened

the underplate and a beginning of the wiring phase



Now lets plug everything to the board !

- 18 AWG : power
- 22 AWG : heat
- 26 AWG : sensors (you may use the leftover from the motors)
- Nema 14 sequence : red, blue, green, black
- For the geared stepper PG35L, after trying the three sequence (as suggested by StepperMotor#Shortcut_for_finding_the_proper_wiring_sequence), I found the order : Black (1B), Green (1A), Orange (2A), Yellow (2B)
- Y-motor (15cm, under the board)
- X-motor (50cm)
- Z-motors (17cm and 25cm)
- Extruder-motor + fan
- Y-endstop (green 32cm)
- Z-endstop (blue 25cm)
- X-endstop (red 50cm)
- Hotend-thermistor (blue 60cm)
- Hotend-resistor (red 60cm)
- Hotend-fan (red/black 60cm)
- Bed-thermistor (blue 30-35cm)
- Bed-peltier
Finish by the bed wires (peltier and thermistor), as they will move they need to be above all the other wires.
<videoflash>HCyQjKg8jjU|320|240</videoflash>
Y-axis (105mm between smooth rods)

 x2
x2
<videoflash>CvJv414KFWM|320|240</videoflash>
- .jpg
Slide the smooth rods through the Y-idler or Y-motor part
- .jpg
put the Y-carriage (aka frog) on the smooth-rods
- .jpg
and then finish to slide them through the other part
- .jpg
To align the Y-motor and Y-idler check that the carriage run smoothly. Since the Y-motor is already in the middle thanks to the 6mm bump on the rear-foot-left, use the carriage to set the Y-idler's distance from each front-foot (expected to be ~12mm from each inner side), once satisfied you can lock the Y-idler in place with its respective round M4x8.
- .jpg
Make a loop at each end of the belt with zip-ties (the orientation showed is the best I found)
Tighten the belt by closing the loops with zip-ties
- .jpg
trim everything but keep a short length on the tensioning zip-tie to be able to pull on it with a plier

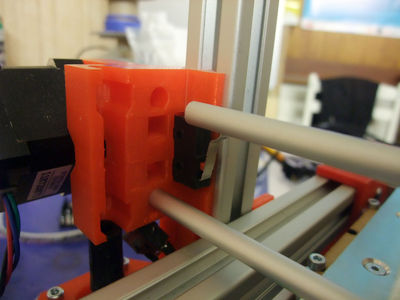
X-axis (30mm between smooth rods)
X-ends
 X-motor
X-motor
 extruder-idler
extruder-idler


 x1
x2
x3
x1
x2
x3
x4-6
x2
x1
x1
 x1
x1
<videoflash>XdfJH7XhZbk|320|240</videoflash>
After wiring, put the two x-ends in place (impregnate the printed parts with oil for better sliding) and add the smooth-rod without forgetting the three linear bearings.
X-carriage
 x1
x2
x1
x2
 x3 (LM6UU or igus RJMP-01-06)
x3 (LM6UU or igus RJMP-01-06)
<videoflash>mGf8y23Vfdc|320|240</videoflash>
don't forget to add the linear bearing/bushing on the smooth-rods




Top Frame
 x1
x1
 x1
x1
x1
x1
 x1
x1
x8
x8
<videoflash>|320|240</videoflash>
<videoflash>xOSs5n_cQY4|320|240</videoflash>
Setting the Z-sliders (242mm between threaded rods)
x4
 x2
x2
- turn the rods in the x-ends to push them in the vinyl coupling
<videoflash>iZKFV5miQEk|320|240</videoflash>
X-axis 2/2
<videoflash>0r0LzsToHcs|320|240</videoflash>
- Now you can add some tension to the x-belt
<videoflash>sVjxMQwowbg|320|240</videoflash>
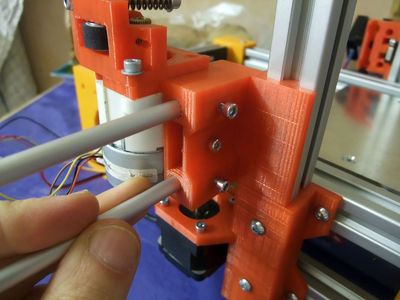
 hotend
x4
x4
hotend
x4
x4
- 700mm belt
- zip-tie x2
<videoflash>yqNI2H22ZcY|320|240</videoflash>
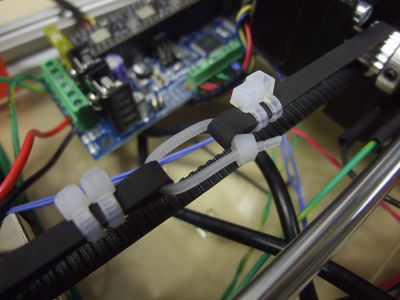
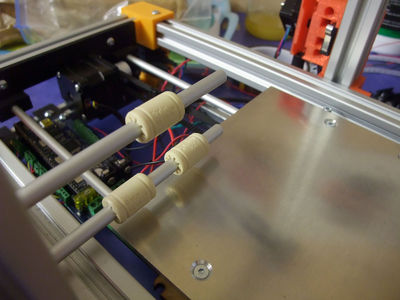
Tidying
- spiral wrapping band : for the wires that came out of the base (30cm left / 57cm right).
<videoflash>CdsBjoGTuLI|320|240</videoflash> <videoflash>j3T9N8Ssmpc|320|240</videoflash>
Leveling the bed and zeroing
The Z-zero is made when leveling the bed.
- Start by roughly leveling it
- then move the nozzle to the lowest point
- and adjust the 3 screws to level it regarding that height (by turning them until the homing move stop lowering the springs)
- repeat on each corners so the zero is exactly when the nozzle stop touching the bed (true for the four corners+center)
- I like to start with the X direction (from the middle of the two left-screws to the right screw)
- then only working on the left side, trying alternatively from the front to the end corner
- after that it's supposed to be leveled but may need few more tweaking for the right corners
- Skeinforge : you will only have to add a little offset (altitude), to have the desired height for the first layer, usually the same as your layer height.
- Slic3r : leave z-offset at 0, it will add one layer height automatically (you still may have to adjust it slightly to fine tune the Z-zero).
Another advantage of that : by moving to the center of the bed from the zero height, the nozzle is also wiped by the side of the bed from any purged plastic
<videoflash>|320|240</videoflash>

{kind=link}
{kind=link}
{kind=link}