TMC2130
Collection of information about TMC2130 stepper driver boards.
And in particular; how to use solder jumpers on the driver board to switch between Standalone mode and SPI mode on TMC2130 driver boards
On-chip 5V regulator
Please note that there is an internal 5V linear regulator, on the chip itself, and the about 20mA that the logic on the chip uses, will cause the following heat dissipation at different stepper supply voltages[1].
- 0.1W @ VM=12V
- 0.3W @ VM=24V
- 0.6W @ VM=36V
- 0.8W @ VM=45V
So a heat sink, that can help remove this heat from the board/chip, should always be used.
Good Heat Sink sizes. The bigger the better:
Hardware
Watterott
Design files: https://github.com/watterott/SilentStepStick
Pictures:

Pinout details:
makerbase
Design files: https://github.com/makerbase-mks/MKS-StepStick-Driver/tree/master/MKS%20TMC2130
Versions: V1.0
Pictures:

(R3 is typically a 0 ohm jumper chip)
Pinout details:
BTT
Design files:
Pictures:

V1.1

V2.0

V3.0



Pinout details:
Fysetec
Design files: https://wiki.fysetc.com/TMC2130
Versions: V1.0, V1.1, V1.2
- V1.0 default is set up for Standalone mode,
- V1.1 default is set up for SPI mode.
- V1.2 is prepared with some of the pins going up. Default is set up for SPI mode.
Modes can be adjusted by changing solder jumpers, but maybe it is easier to simply get the the version that corresponds with your intended mode of use.
Pictures:
- A picture from Tom's 3D Forum
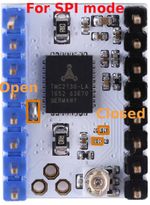
- Suggestion: use a 0R (zero ohm) 0603 or 0402 chip, to connect the CFG5 and CFG6 jumpers

Pinout details:
See Fysetec wiki: Wiring Diagram
Max current:
There is a 'Max current' to 'Voltage reference' calculator on the Fysetec wiki: Calculator
I like to have a low default setting, and then adjust using SPI commands
0.3A => 0.42V on the adjusting screw
0.6A => 0.85V on the adjusting screw