FoldaRapX
Release status: in progress

| Description | another folding reprap
|
| License | |
| Author | |
| Contributors | |
| Based-on | |
| Categories | |
| CAD Models | |
| External Link |
Principle
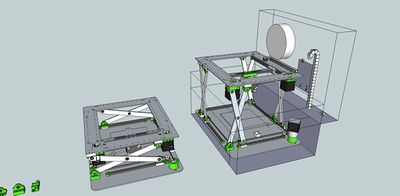
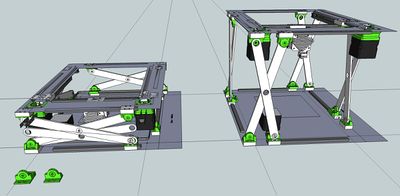
Back to the concept of a foldable RepRap using a scissor-like mechanism for the Z axis.
The main advantage is that this time the folding mechanism is part of the movement, and don't require any preparation for the machine to function... it will unfold as much as the part to print is tall. And makes for an even more lazy foldable RepRap : open the case, plug, print.
Build notes
- tensioning the z-belt should be done in the upward direction, in order to tension against gravity
To-Do
Version 0.2
- change the aluminium flight case (not cheap) for a regular wooden flight case (easier to use and customize)
- move the linear rail 5mm closer to the pivot, in order for the end rail (printed part) to play its role of mechanical stop
- if the aluminium plate were made with a CNC instead of a laser-cutter, we could include the tapping of the holes (would save lot of time)
- 24v
Version 0.1
- the complete upper plate weight enough to move the gearbox of the z-motor (if motor off) : caution when using M84, or use a higher gearbox ratio, a worm drive, a nema 23 ?
- fine tune E step value (837 for a start)
- test print even without an adapted firmware
- creating a RepRap Firmware for the scissor Z axis, probably using a mathematic similar of a linear delta : solving a square triangle equation (will need help here)
- add LED lights
- add Duet enclosure
R&D
- Plan B.jpg
And/or, if it is not the belt skipping but the motor having not enough torque, I will use the same form factor but with a greater gearing ratio (from 5:1 to 14:1), or change it completely, from planetary to worm drive (with the advantage of can't being moved by the upper plate, the mechanical conversion being only motor->worm and not the other way)
- 2020 progress.jpg
Almost one year after... faulty blade fused changed, Duet2 works, and it moves ! But with the full weight multiplied by the scissors at the lowest height, the belt skip some tooth on the classic 18 teeth pulley. My guess is that not enough teeth are in contact to transfer the torque. Next try will be with a 32 teeth pulley.
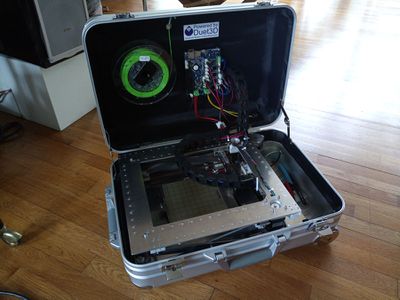
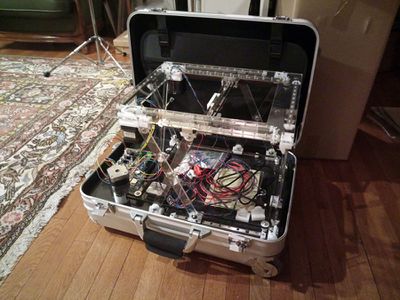
once open everything is ready to be used :)

few bolts were added to hold the components in the lid (Z-cable-chain, Duet, spool-holder, will add the power supply too)
configuring the Duet as far as possible, like a CoreXY machine, but will need to create a firmware for the scissor Z mechanic
implementing the extruder, cable-chains, sorting the wires, adding parts printed in flexible filament to position the lower plate in the case while also dampening the chocks when moving the case
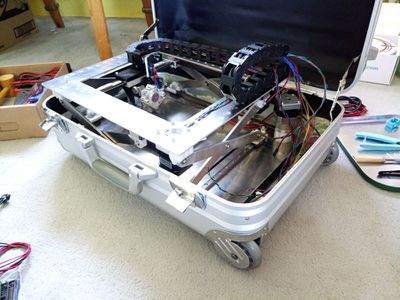
removing the internal padding of the case
the wheels are taking more place inside the case than what I thought : I am changing the orientation and position of the electronic (the Duet will be in the lid instead of the base), it will also makes for a better path for the wires/cable-chains and better use the space.
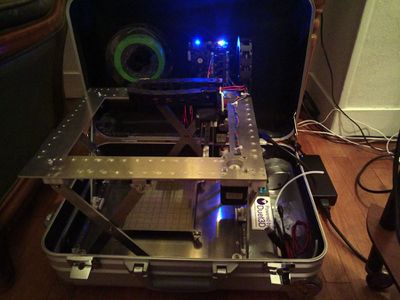
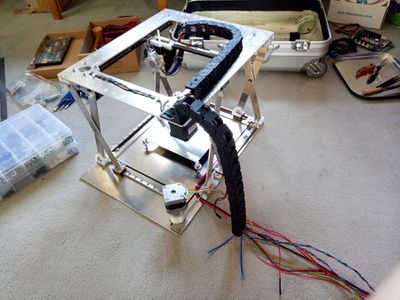
in the aluminium case :)
once assembled there is more rigidity than what I feared to have, thanks to alternating the orientation of the scissors (good intuition here) the material works mostly in its horizontal plane, so even plastics seems fine (except that a scissor broke for pushing to far) - [video of a test move]
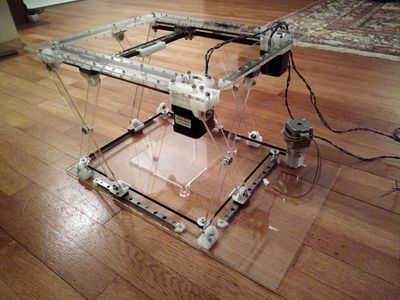
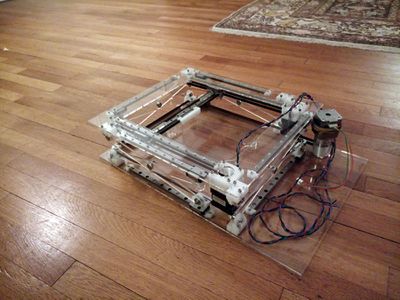
scissor movement, smooth and without play along the linear movement (thanks to press-fitting everything), but some angular play in one of the bearing (balls/cage).

press-fitting the 695zz bearings (5x13x4mm) and D5L10 spacers with a vise works (the spacer outer diameter is 5.1mm in fact)... but using D4L10 shoulder screws and 604zz bearings (4x12x4mm) instead will be easier, I will keep that in mind for the next iteration.
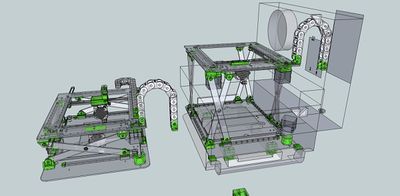
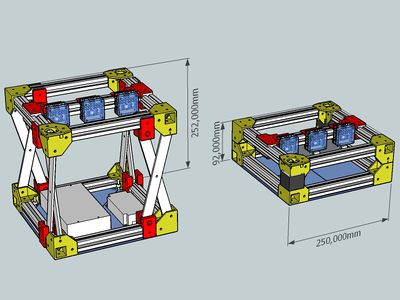
360x360mm footprint, almost the same as the FoldaRap with a roll of filament. 4mm aluminium frame, H-bot, linear rails, e3D-titan, geared-nema17 for the Z-belt. And should have a 150x150x150mm build area.
was imagined during the initial concept of the "FoldaRap2" mid-2012, then named "Mondrian" when it was not pursued at the time











